
O navigation satellite timing and ranging global positioning system (sistema de posicionamento global de navegação por satélite com tempo e alcance, ou NAVSTAR GPS), chamado mais simplesmente de GPS, está se tornando o sistema mais aceito para a navegação de aeronaves.
O GPS é composto de três segmentos independentes: o segmento espacial, o segmento de controle e o segmento dos usuários.
Como vemos na Figura Abaixo, o segmento espacial completo foi projetado originalmente com 24 satélites que completam duas órbitas por dia, repetindo o mesmo rastro terrestre em cada órbita.
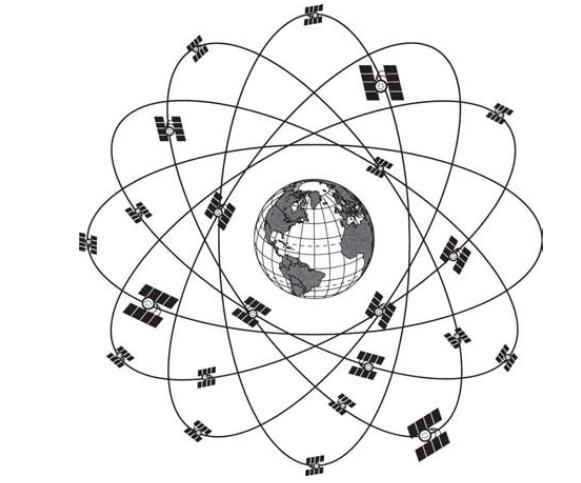
Desde o início do projeto, foram adicionados mais satélites ao segmento espacial do GPS.
Os satélites adicionais fornecem medições redundantes para aumentar a precisão do GPS.
Hoje, cerca de nove satélites estão visíveis a partir de qualquer ponto no solo a qualquer momento, muito acima dos quatro satélites que são o mínimo necessário para estabelecer a posição.
Os satélites ficam em órbita a aproximadamente 11.000 milhas (17.700 km) da superfície da Terra.
Os satélites transmitem pulsos de tempo extremamente precisos e um sistema de código que define a posição exata dos satélites no momento da transmissão dos dados.
O segmento de controle é composto de diversas estações de monitoramento no solo e uma estação de controle mestra.
Os monitores recebem as transmissões do satélite pelo menos uma vez ao dia e repassam tais informações para a estação de controle mestra.
A estação mestra calcula qualquer deriva que possa ter ocorrido na órbita dos satélites ou no pulso temporal.
Um sinal de correção é enviado aos satélites, e essa correção é incluída no código de localização transmitido dos satélites para o usuário.
O segmento dos usuários é composto de dezenas de milhões de usuários civis, comerciais e científicos do serviço de posicionamento padrão mais conhecido pelo nome de GPS.
A indústria da aviação adotou o GPS de braços abertos, transformando-o em um dos sistemas de navegação primários para os segmentos de voo de cruzeiro e de aproximação.
Não seria erra[1]do afirmar que o GPS revolucionou a navegação.
O GPS agora integra todas as facetas da vida moderna, da telefonia móvel a aplicações táticas militares, transformando-se no principal sistema de navegação e posicionamento para uma infinidade de usos.
O segmento dos usuários muitas vezes é um receptor de GPS simples composto de uma antena, o circuito do receptor- -processador, um dispositivo de temporização estável e alguma forma de interface de saída, como um display de mapa móvel de LCD.
A antena deve estar sintonizada às frequências transmiti[1]das pelos satélites de GPS.
O circuito do receptor-processador, junto com o relógio altamente estável (muitas vezes um oscilador de cristal) realiza os cálculos matemáticos necessários para determinar a posição da aeronave.
O receptor é descrito pelo seu número de canais, significando quantos satélites ele consegue monitorar simultaneamente.
Em aeronaves modernas, a saída do processador é enviado ao display de tela plana integrado e ao sis[1]tema de voo automático, caso a aeronave o possua.
A Figura Abaixo mostra um exemplo típico receptor-processador de navegação por GPS para aeronaves.
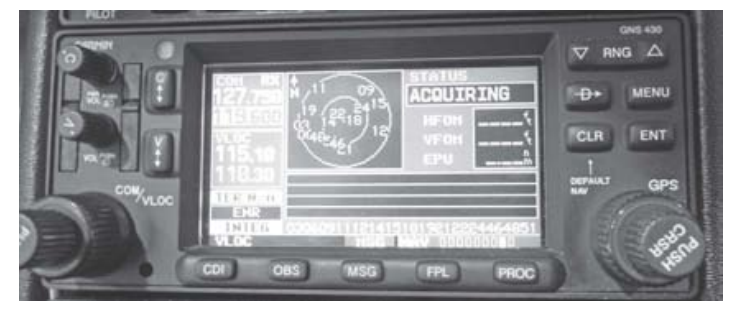
aeronaves.
Essa unidade contém todos os circuitos receptores e processadores necessários, além de um display integrado com recursos de mapa móvel.
O mapa móvel atualiza continuamente a posição da aeronave e “se move” sempre que a posição da aeronave muda.
O mapa móvel se tornou um recurso padrão em todos os displays de GPS modernos.
Para operar corretamente, o GPS deve receber no mínimo sinais de quatro satélites; na maioria dos casos, mais de quatro sinais podem ser estabelecidos com facilidade.
A maioria dos equipamentos modernos consegue processar todos os sinais de GPS ao mesmo tempo e atualizar a posição da aeronave quase instantaneamente.
Para receber os sinais apropriados dos satélites, uma antena de GPS externa costuma ser montada na parte superior da aeronave; a antena também pode ser interna, instalada atrás de um painel de plástico que não degrada o sinal de GPS.
A teoria de operação do GPS se baseia em geometria básica.
Se você sabe a distância e o local de três ou mais pontos, é possível determinar seu local exato.
Os satélites transmitem um sinal de tempo e local para o receptor do usuário.
A distância até o satélite é determinada pela medição do tempo de percurso do sinal transmitido.
Conhecendo a velocidade de propagação da onda de rádio (a velocidade da luz), o receptor calcula a distância até o satélite.
Para entender melhor a teoria de operação, estude o exemplo na Figura Abaixo.
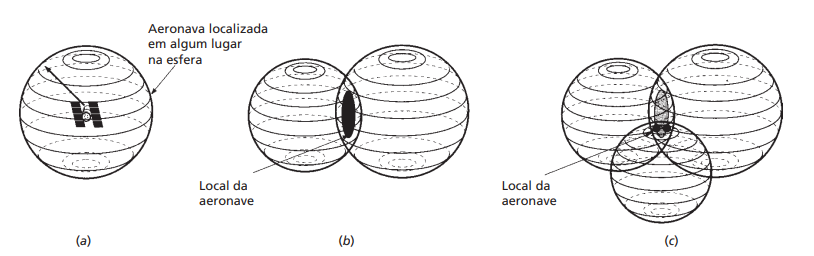
Sabendo que a distância até um satélite é de 15.000 milhas, sua aeronave está no lado de fora de uma esfera a 15.000 milhas daquele satélite (Figura Acima– a).
Sabendo que a distância até um segundo satélite é de 14.200, a aeronave está na intersecção das duas esferas (Figura Acima- b).
A Figura Acima- c mostra que receber a distância de três satélites localiza a aeronave em um de dois pontos ao longo do exterior das três esferas. A medição usando o quarto satélite determina o local exato da aeronave.