
Hoje, muitas aeronaves de transporte modernas empregam conceitos de projeto de fly-by-wire (FBW).
O projeto usa fios elétricos, circuitos e controles para substituir os cabos e sistemas hidráulicos usados em aeronaves tradicionais.
Atualmente, o fly-by-wire é utilizado apenas nas aeronaves grandes e modernas, como o A-380 e o B0787, além de algumas aeronaves militares, mas há anos muitas aeronaves usam sinais elétricos para movimentar superfícies de controle.
Por exemplo, o Cessna 310 utiliza um motor elétrico e controles simples para a operações dos flapes.
Na prática, esse sistema opera os flapes “por fios” (by wires).
Todas as aeronaves FBW modernas contêm múltiplos computadores e sistemas de dados redundantes para produzir a segurança necessária para o voo.
Essas aeronaves também devem conter um sistema elétrico complexo que fornece a energia necessária para os controles do FBW em caso de múltiplas panes do sistema.
As aeronaves atuais usam sinais elétricos para mover os controles de voo primários, como profundores, lemes direcionais e ailerons.
Os controles de voo primários exigem reposicionamento constante por parte do piloto, e logo, envolvem um sistema computadorizado complexo, com múltiplas entradas de diversos sensores.
O projeto de FBW moderno permite a criação de uma aeronave mais eficiente, que voa mais rápido e poupa combustível.
Esta porção do texto analisa os conceitos de projeto básicos de um sistema de controle de voo de fly-by-wire.
É preciso observar que apesar dos sistemas de FBW serem produzidos por diversos fabricantes e para muitas aeronaves diferentes, todos contêm muitos pontos em comum.
Uma das semelhanças mais óbvias de todas as aeronaves FBW é o nível de integração entre os sistemas de controle e a instrumentação, possibilitada pelo uso de processadores de computadores de alta velocidade e memória digital de alta capacidade.
O Boeing B-777 foi a primeira aeronave comercial a ser totalmente FBW.
O sistema usado nessa aeronave é chamado de sistema diretor de voo de piloto automático (AFDS) e opera usando o padrão de barramento de dados ARINC 629 para boa parte das comunicações do sistema.
O AFDS tem dois objetivos principais: controlar automaticamente a atitude do avião para atender os requisitos navegacionais estabelecidos pelo plano de voo e fornecer indicações para que a tripulação de voo possa controlar a aeronave manualmente.
O sistema é capaz de executar todos os aspectos do voo, da decolagem ao voo de cruzeiro à aterrissagem automática.
A função de diretor de voo, discutida anteriormente neste capítulo, fornece uma referência visual para o piloto através das barras de comando nos PFDs.
A tripulação usa as barras de comando do diretor de voo como guia para controlar a aeronave.
Os subsistemas do AFDS incluem:
(1) AIMS: sistema de gestão das informações do avião;
(2) ADIRU: unidade de referência inercial de dados aerodinâmicos;
(3) SAARU: unidade de referência de dados aerodinâmicos de atitude secundária; (4) PFC: computador de voo primário;
(5) ACE: unidade de eletrô[1]nica de controle do atuador/ e
(6) PCU: unidade de controle da potência.
O AIMS utiliza vários módulos substituíveis durante a escala (LRMs) para integrar os diversos sistemas, fazendo com que compartilhem funções e componentes em comum.
O AIMS integra a coleta de dados, funções de computação, suprimentos de energia e funções de saída de diversos subsistemas.
Diversos sistemas da aeronave se comunicam com o AIMS, incluindo o sistema de instrumentos eletrônicos; assim, todos os dados do diretor de voo são enviados através de módulos do AIMS.
A Figura Abaixo mostra os componentes básicos e interconexões relacionadas do AFDS.
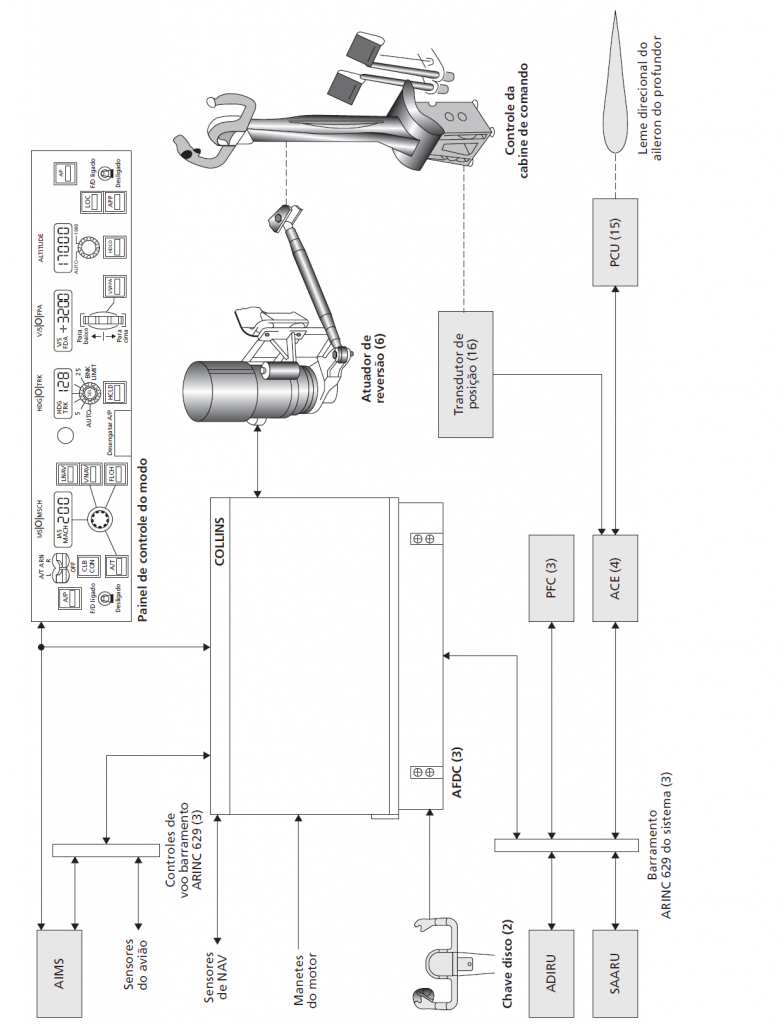
Nela, vemos que há três computadores do diretor de voo do piloto automático (AFDCs), que são as unidades de processamento principais para o sistema.
Cada AFDC recebe dados redundantes de outros processadores através do barramentos de dados ARINC 629.
O AFDS monitora as diversas entradas ativadas pelo piloto usando três computadores do diretor de voo do piloto automático.
Cada computador calcula a resposta necessária e envia sinais de saída através de três barramentos de dados ARINC 629 para os PFCs.
Estes, por sua vez, enviam sinais de comando digitais de volta aos ACEs, que convertem as informações em sinais analógicos para o comando das unidades de controle de potência (PCUs).
Cada PCU contém uma válvula de servomecanismo operada eletricamente que controla os atuadores hidráulicos que movem a superfície de controle.
É importante observar que a força real usada para o movimento da superfície de controle é fornecida pelo sistema hidráulico central da aeronave; as PCUs fornecem apenas o controle do sistema hidráulico.
Cada superfície de controle é conectada a uma, duas ou três PCUs, dependendo das exigências de carga.
Quando uma superfície de controle é movida, o software do PFC calcula os comandos de reversão que são enviados aos AFDCs.
Estes, por sua vez, enviam os sinais de reversão aos atuadores de reversão apropriados, que reposicionam os pedais do leme direcional e/ou controlam a roda/cruzeta quando necessário (ver Figura Acima).
Os atuadores de reversão são necessários para dar uma sensação “realista” aos controles de voo; por exemplo, quando o piloto move a roda de controle, o atuador de reversão aplica uma pressão contrária sobre a roda.
O conjunto atuador é composto de um servomotor elétrico semelhante àqueles discutidos anteriormente neste capítulo.
Todas as aeronaves fly-by-wire devem incorporar um sistema de reversão como esse.
O painel de controle do AFDS fica localizado dentro do visor antiofuscante, logo acima dos displays eletrônicos centrais.
Como mostrado na Figura Abaixo, o painel de controle de modo do AFDS permite que os pilotos selecionem diversas funções e voo automático.
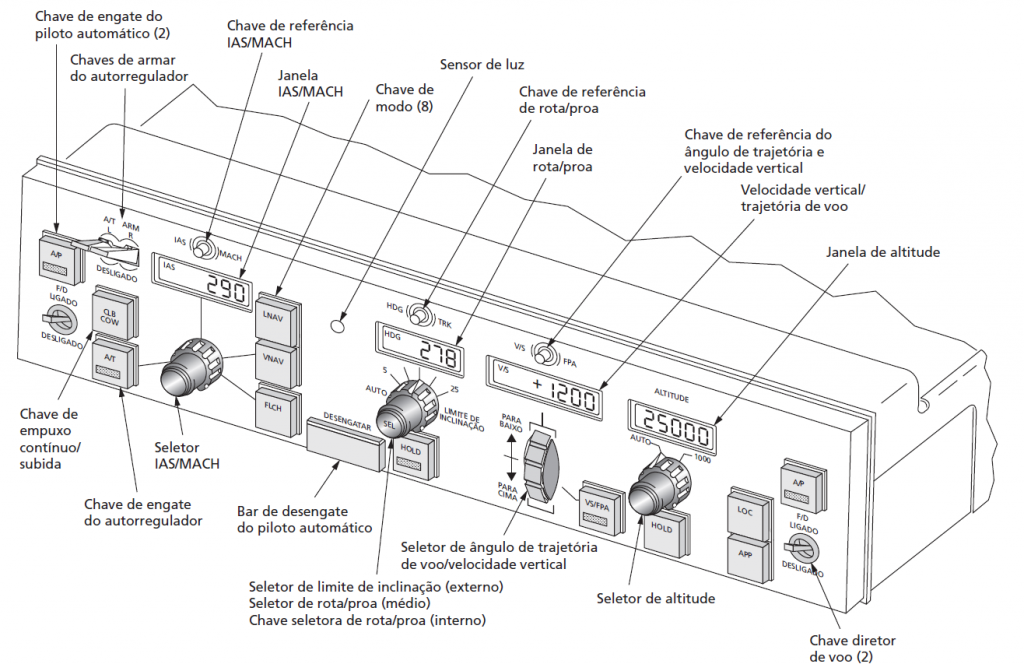
Esse tipo de painel de controle de voo automático é utilizado em muitas aeronaves de transporte.
O Airbus A-380 e o Boeing B-787 também são aeronaves fly-by-wire e adicionaram mais um nível de sofisticação elétrica ao sistema de controle de voo; ambas empregam atuadores de superfícies de controle eletro-hidráulicos.
Os atuadores eletro- -hidráulicos usam motores elétricos poderosos para acionar bombas hidráulicas dedicadas, projetadas para alimentar um atuador de superfície de controle específico.
O A-380 ainda utiliza um sistema hidráulico central semelhante aos dos outros aviões da Airbus, mas os atuadores eletro-hidráulicos são usados como sistemas de reserva em caso de pane do sistema principal.
O B-787 usa atuadores eletro-hidráulicos como fonte de energia primária para a movimentação das superfícies de controle.
Outro conceito de projeto que surgiu com o desenvolvi[1]mento da integração e os computadores de grande capacidade de uma aeronave fly-by-wire é chamado de proteção do invólucro.
A proteção do invólucro é utilizada para garantir que a aeronave nunca excede os limites operacionais e entra em uma configuração insegura, como uma condição de estol.
O sistema de voo automático usa software de sistemas para calcular o “invólucro” para um voo seguro.
Por exemplo, se o piloto move os controles da cabine de comando de forma a tirar a aeronave do invólucro de segurança, o sistema de voo automático ignora o comando e muda a arfagem, rolamento ou guinada apenas até o limite seguro máximo.