
Muitos motores em aeronaves modernas são controlados por LRUs que analisam uma ampla variedade de dados de entrada, processam as informações e enviam os sinais de ativação do motor correspondentes.
Esse tipo de sistema de controle de motor é bastante usada em aeronaves de alta tecnologia complexas, como o Gulfstream GV, o Boeing 787 e o Airbus A-380.
Na tentativa de tornar essas aeronaves mais confiáveis, projetistas e engenheiros se esforçam para iluminar as peças móveis que podem se desgastar ou se desajustar.
Em muitas aeronaves computadorizadas, um sensor de proximidade substituiu as chaves de fim de curso que eram usadas tradicionalmente para ligar e desligar um motor.
Um sensor de proximidade é um componente de estado sólido capaz de detectar a presença de objetos próximos sem qualquer contato físico.
Os sensores de proximidade, com o auxílio de circuitos eletrônicos sensíveis, pode simplesmente detectar quando um objeto se aproxima o suficiente para ativar o sensor.
O objeto não precisa entrar em contato físico, como acontece com uma chave de fim de curso tradicional.
Essa estrutura cria uma maneira mais confiável de detectar a posição de componentes móveis.
A desvantagem do sensor de proximidade é que ele apenas pode realizar a comutação com níveis muito baixos de tensão e de corrente; assim, eles precisam utilizar algum tipo de circuito eletrônico para fins de controle do motor.
Um sensor de proximidade muitas vezes emite um campo eletromagnético ou feixe de radiação eletromagnética.
O sensor é projetado para detectar qualquer mudança no campo magnético ou sinal de retorno.
O sinal de retorno muda quando outro objeto se aproxima bastante do sensor.
O objeto percebido muitas vezes é chamado de alvo do sensor de proximidade.
Cada tipo de alvo exige um sensor de proximidade diferente.
Por exemplo, um sensor fotoelétrico capacitivo poderia ser apropriado para um alvo de plástico; um sensor de proximidade indutivo sempre exige um alvo de metal.
A Figura abaixo mostra um sensor de proximidade comum.
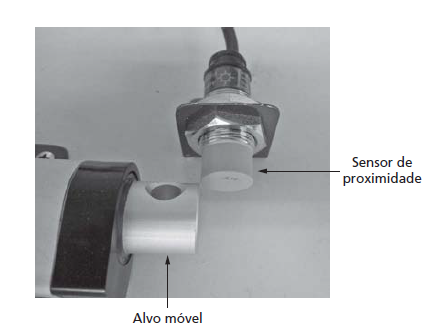
A distância máxima que esses sensor pode detectar é definida como a “amplitude nominal”.
Usando circuitos eletrônicos, alguns sensores podem ajustar sua amplitude nominal.
Os sensores de proximidade podem ter alta confiabilidade e vidas funcionais longas devido à ausência de peças mecânicas e de contato físico entre o sensor e o objeto percebido, o que os torna muito populares nos veículos aeronáuticos e aeroespaciais modernos.
Os usos mais comuns para os sensores de proximidade incluem a detecção do posicionamento de componentes móveis, como trens de pouso, controles de voo, válvulas de controle aéreo e travas das portas do compartimento de carga.
Outro sensor moderno usado para determinar a posição de um componente móvel é o chamado transdutor diferencial.
Dois transdutores comuns usados para medir a posição são o transdutor diferencial variável linear (LVDT) e o transdutor diferencial variável rotativo (RVDT).
Esses sensores podem detectar a posição de um objeto como uma condição variável, enquanto um sensor de proximidade somente pode detectar uma posição do objeto.
O LVDT e o RVDT utilizam os conceitos de indução eletromagnética aplicados em um transformador comum.
Em uma forma simples, podemos imaginar esses sensores como um transformador com um material de núcleo móvel.
O transdutor diferencial variável linear tem três bobinas posicionadas com suas extremidades lado a lado em torno de um tubo, como vemos na Figura seguinte.
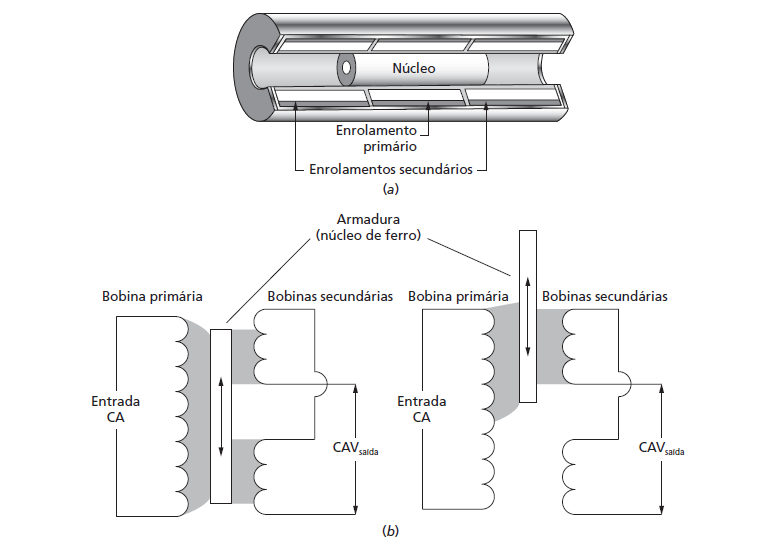
A bobina central é o enrolamento primário e as duas bobinas externas são os enrolamentos secundários superior e inferior.
Um núcleo ferromagnético cilíndrico, ligado ao objeto cuja posição será medida, desliza ao longo do eixo do tubo.
Uma corrente alternada aciona a primária e faz com que uma tensão seja induzida em ambas as bobinas secundárias.
A frequência CA quase sempre é relativamente alta, na faixa de 1 a 10 kHz, para ajudar a facilitar a indução eletromagnética e tornar o transdutor mais eficiente.
Enquanto o núcleo se move, a ligação magnética primária com as duas bobinas secundárias muda e provoca uma mudança nas tensões induzidas.
As bobinas são conectadas de forma que a tensão de saída seja a diferença (de onde vem o termo “diferencial”) entre a tensão secundária superior e a tensão secundária inferior.
Quando o núcleo está exatamente na posição central, tensões iguais são induzidas nas duas bobinas secundarias, mas os sinais estão 180 º fora de fase e, logo, cancelam um ao outro.
Teoricamente, a tensão de saída é zero sempre que o núcleo está centralizado; esta é conhecida como a posição nula.
O transdutor tem sensibilidade máxima nesse ponto.
Se o núcleo do LVDT é movido em direção ao topo, a tensão induzida na bobina superior aumenta e a tensão na bobina inferior diminui.
Se o núcleo se move na direção contrária, cruzando a posição nula central, ocorre um deslocamento de fase entre as tensões primária e secundária.
À medida que o núcleo se afasta da posição central, a mudança de tensão aumenta.
Os sinais de saída da bobina secundária normalmente são enviados a um LRU que contém os circuitos de controle necessários para monitor a posição.
O LRU pode ser programado para controlar o motor usado para mover o componente e o núcleo do LVDT.
O uso de LVDTs e controles eletrônicos permitiu que os engenheiros projetassem circuitos de motores que desaceleram o motor quando ele se aproxima do ponto de parada; ou mais de um ponto de parada pode ser integrado ao circuito.
O LVDT é projetado com muito cuidado, com bobinas longas e esguias, para tornar a tensão de saída basicamente linear em um amplo espaço de deslocamento, que pode ter vários centímetros de comprimento.
O núcleo deslizante de um LVDT muitas vezes corre em uma luva de plástico de alta densidade com pouquíssima fricção, o que torna o LVDT um dispositivo de alta confiabilidade.
O LVDT quase sempre é projetado para ficar totalmente selado contra o ambiente e pode ser colocado em quase qualquer posição na aeronave.
Os LVDTs normalmente são usados em sensores de feedback de posição em servomecanismos de controle de voo.
Um transdutor diferencial variável rotativo (RVDT) é outro tipo de transformador elétrico usado para medir o deslocamento angular.
Como o nome sugere, o RVDT é usado para medir o movimento de objetos que giram.
Parecidos com o LVDT, os RVDTs usam uma tecnologia sem escovas e sem contato para prolongar a vida útil e aumentar a confiabilidade necessárias em aeronaves.
Como vemos na Figura abaixo, a maioria dos RVDTs é construída com um rotor de dois polos conectado ao componente móvel.
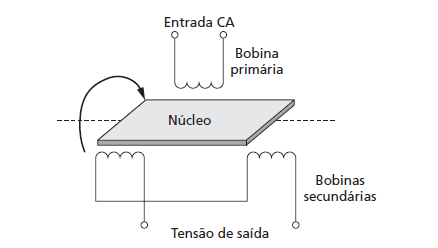
O enrolamento primário e os dois enrolamentos secundários ficam localizados em torno do motor.
A teoria da operação desse dispositivo é semelhante àquela que acabamos de descrever para o LVDT, exceto que o movimento de entrada é rotacional e não linear.