
A vantagem de um sistema de navegação inercial (INS) é que ele não exige sinais de rádio externos.
O conceito o torna extremamente valioso para aeronaves militares e espaçonaves.
As aeronaves civis também utilizam um INS para aproveitar suas características desejáveis para navegação de longo alcance.
Como o nome sugere, um sistema de navegação inercial depende das leis da inércia para determinar a posição da aeronave.
Em outras palavras, quando o ponto de partida de um voo é conhecido por sua latitude e longitude, o computador do INS determina novas posição pela medição das forças inerciais que atuam sobre a aeronave.
As três leis básicas da inércia foram descritas por Sir Isaac Newton há mais de 300 anos. São elas:
1. Primeira lei de Newton Um corpo continua em estado de repouso, ou movimento retilíneo uniforme, a menos que sofra a atuação de uma força externa.
2. Segunda lei de Newton A aceleração de um corpo é diretamente proporcional à resultante das forças que atuam sobre tal corpo.
3. Terceira lei de Newton Para cada ação existe uma reação igual e oposta.
Aplicando essas leis à navegação aérea, vemos que a aeronave não se moverá ou alterará seu movimento a menos que sofra a atuação de uma força externa (empuxo do motor, arrasto do vento, gravidade e sustentação da asa).
Como a mudança de movimento (aceleração) é proporcional à força aplicada, podemos determinar a aceleração medindo as forças externas que atuam sobre a aeronave.
Como há uma força de reação para cada força externa que atua sobre a aeronave, podemos medir a força de reação para determinar a aceleração da aeronave e, logo, sua velocidade e posição.
O instrumento usado para detectar aceleração é chamado de acelerômetro.
Pelo menos dois acelerômetros são necessários para cada sistema de INS.
Um mede as acelerações no sentido norte-sul, o outro as acelerações leste-oeste.
A maioria dos sistemas de INS de aeronaves contém pelo menos três sistemas de acelerômetros, um para cada eixo da aeronave.
Uma força de aceleração tem magnitude e direção, então ambas a aceleração e a desaceleração são medidas.
Como mostrado na Figura Abaixo, um acelerômetro simples poderia ser um dispositivo do tipo pêndulo, ou seja, que deve ser livre para oscilar em duas direções.

A força de reação (oposta às forças externas aplicadas à aeronave) faz com que o pêndulo oscile.
A oscilação do pêndulo é medida por um sensor extremamente preciso que cria um sinal elétrico.
Obviamente, o acelerômetro de uma aeronave precisa ser mais sofisticado do que um pêndulo simples.
Os acelerômetros modernos empregam tecnologias extremamente sensíveis, capacitivas, indutivas e piezelétricas.
Cada tipo de sensor converte um pequeno movimento mecânico (aceleração) em um sinal elétrico.
O sinal é enviado a um processador, que o combina com outras informações e então calcula a posição da aeronave.
Outro tipo de acelerômetro moderno é composto de vigas cantiléver extremamente pequenas (ver Figura Abaixo).
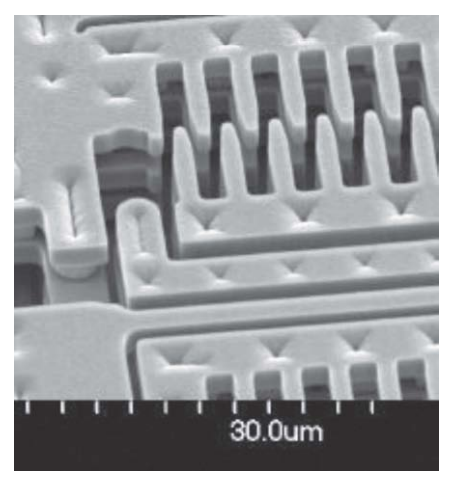
acelerômetro.
As vigas são tão pequenas e delicadas que quando sujeitadas a uma aceleração mínima, elas mudam de posição; esse movimento cria uma mudança de capacitância entre as vigas.
A mudança de capacitância é diretamente proporcional à força de aceleração sobre o sensor.
Uma tecnologia moderna chamada de sistemas microeletromecânicos (MEMSs) é usada para construir esse tipo de acelerômetro.
Os MEMSs são criados usando um processo semelhante aos sistemas usados para criar os microprocessadores e circuitos integrados modernos.
Um acelerômetro básico detecta a aceleração corretamente apenas se permanece perfeitamente nivelado.
Como as aeronaves raramente ficam perfeitamente niveladas durante o voo, todos os acelerômetros aéreos devem ser montados sobre uma plataforma de cardã.
Como ilustrado na Figura Abaixo, uma plataforma de cardã contém dois giroscópios que estabilizam a unidade.
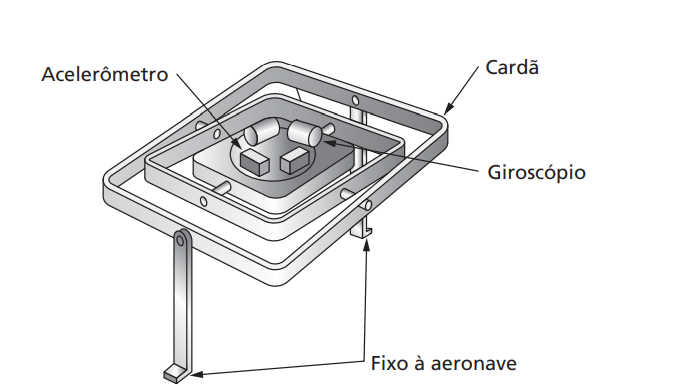
Essa combinação de cardãs e giroscópios cria uma plataforma que permanece nivelada independentemente da atitude da aeronave.
Como o acelerômetro permanece nivelado, ele não detecta as mudanças na atitude da aeronave; logo, o sinal de saída do acelerômetro mede precisamente as mudanças de aceleração.
O sinal de saída do acelerômetro é amplificado e enviado ao computador de medição do INS.
Se o local inicial e o destino da aeronave estão registrados no computador, o sistema de INS é capaz de atualizar continuamente os displays da cabine de comando que informam a posição, velocidade de percurso, proa e distância da aeronave e o tempo até o destino.
Essas informações podem ser monitoradas diretamente com os instrumentos da cabine de comando ou inseridas em um piloto automático, formando um sistema de voo automático completo.
Outro tipo de INS, conhecido pelo nome de sistema de navegação inercial solidário ou strapdown, usa um sistema de acelerômetro de estado sólido (sem peças móveis).
A alma do sistema solidário é o giroscópio a laser, que substitui o antigo giroscópio de massa giratória.
O sistema será discutido em mais detalhes no Capítulo 17. Todos os sistemas de navegação inercial possuem um erro de taxa de deriva que se acumula com o uso.
Esse erro varia de 1 milha de erro por hora de operação a 1 milha de erro para cada 10 horas de operação.
O sistema solidário, mais recente, possui um erro de taxa de deriva menor. Para compensar esse erro, todos os sistemas de navegação inercial precisam de atualizações periódicas a partir de outra fonte de navegação.