TEORIA SOBRE HELICÓPTERO
AERODINÂMICA DE HELICÓPTERO:
Baixar apostila completaAutor: CHARLES EDUARDO DUARTE NUNES
FUNDAMENTOS
1.1 AEROFÓLIO: Qualquer superfície capaz de produzir sustentação/e ou tração quando o ar passar através deste.
1.1.1 SUPERFÍCIES DE SUSTENTAÇÃO: Um helicóptero voa segundo os mesmos princípios básicos de um avião convencional, porque as forças aerodinâmicas para mantê-lo em voo são produzidas na parte superior da asa (pá) quando o ar passa sobre as lâminas do rotor.
A lâmina do rotor, ou asa, é a estrutura que torna o voo possível. A sua forma produz força de elevação quando roda através do ar.
1.2 CORDA: Linha reta que liga o bordo de fuga ao bordo de ataque é sua maior distância.
1.3 VENTO RELATIVO: É o resultado do movimento de um aerofólio através do ar. O vento relativo é sempre oposto ao movimento do aerofólio.
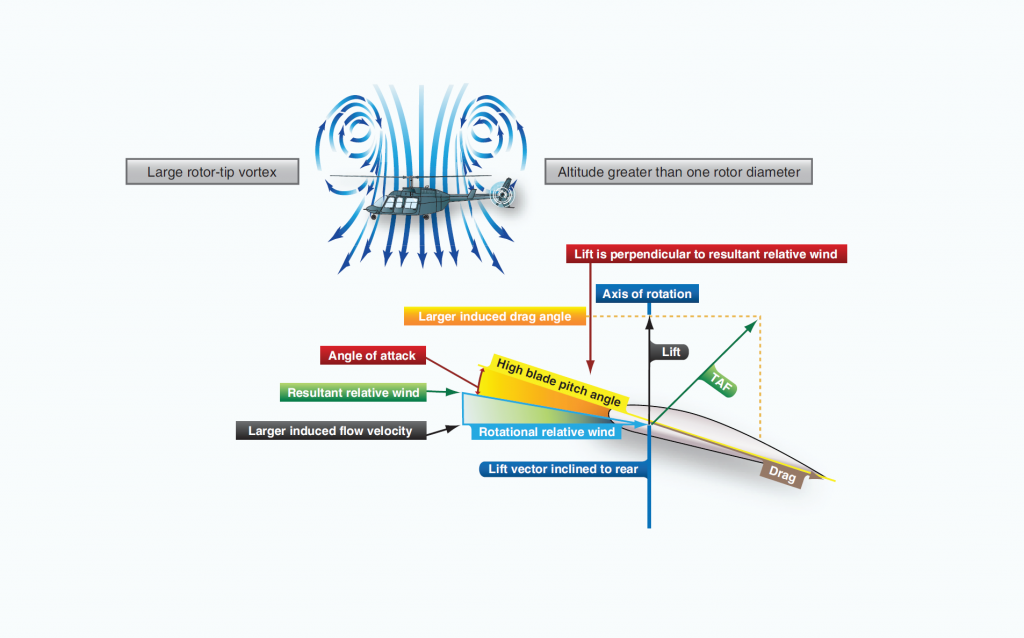
1.4 ÂNGULO DE ATAQUE: É o ângulo formado entre a corda de um perfil e o vento relativo. Em um helicóptero são vários os fatores que podem influenciar no ângulo de ataque.
Alguns movimentos são controlados pelo piloto e outros ocorrem automaticamente devido ao sistema do rotor.
O piloto pode controlar o ângulo de ataque através dos controles de voo cíclico e coletivo. Sempre que o helicóptero sai do voo estacionário este ângulo muda constantemente consoante as pás vão descrevendo o seu ciclo ao longo do disco rotor.
Há fatores que podem afetar o ângulo e sobre os quais o piloto tem pouco ou nenhum controle, o movimento vertical da ponta das pás.
[ninja-inline id=715]
O ângulo de ataque é um dos principais fatores que determinam a quantidade de sustentação e de atrito produzido pela pá.

1.5 ÂNGULO DE INCIDÊNCIA: O ângulo de incidência é o ângulo entre a linha de corda e o plano de rotação do sistema rotor.
1.6 CENTRO DE PRESSÃO: É o ponto onde a resultante aerodinâmica e aplicada.
1.7 SUSTENTAÇÃO: Componente da força aerodinâmica perpendicular ao vento relativo.
1.8 ARRASTO: É o componente que contraria o deslocamento do aerofólio. Tipicamente, quando a sustentação aumenta o arrasto também aumenta. Entretanto, esta relação não é necessariamente proporcional.
1.9 SUSTENTAÇÃO, ARRASTO E ÂNGULO DE ATAQUE: Enquanto o ângulo de ataque aumenta (até o ângulo de estol), a sustentação gerada pela aerofólio aumenta. Porém, enquanto o ângulo de ataque aumenta , o arrasto do aerofólio também aumenta, e o arrasto determinara a necessidade de aumento de potência do motor.
É possível que o aerofólio alcance tal ângulo,que produzira mais arrasto que a potência do motor possa superar. Neste momento haverá uma queda na rotação do rotor principal.
1.10 TORQUE E ANTI-TORQUE: Não se pode compreender as características de voo dos helicópteros sem considerar os fatores de torque, anti-torque e a deriva resultante. Enquanto o rotor principal esta girando em uma direção, a fuselagem tende a girar em sentido contrário.
O rotor de cauda é o responsável por anular o efeito de torque do rotor principal, mas não é somente o efeito torque que ele contraria, também é o responsável pela derivação lateral do helicóptero.
Esta deriva é diretamente proporcional à potência solicitada para contrariar o torque do rotor principal.
Existem dois métodos de neutralizar a deriva do anti-torque. A maioria dos helicópteros americanos tem o mastro do rotor principal levemente inclinado, em oposição ao sentido da deriva.
A vantagem dessa concepção é que permite o helicóptero pairar e voar numa atitude quase nivelada (lateralmente). A maioria dos helicópteros europeus tem o mastro vertical, que permitem a compensação da deriva por maior amplitude de comando cíclico na direção oposta a mesma.
A vantagem é simplicidade, mas os helicópteros tendem a voar com o lado direito levemente baixo.
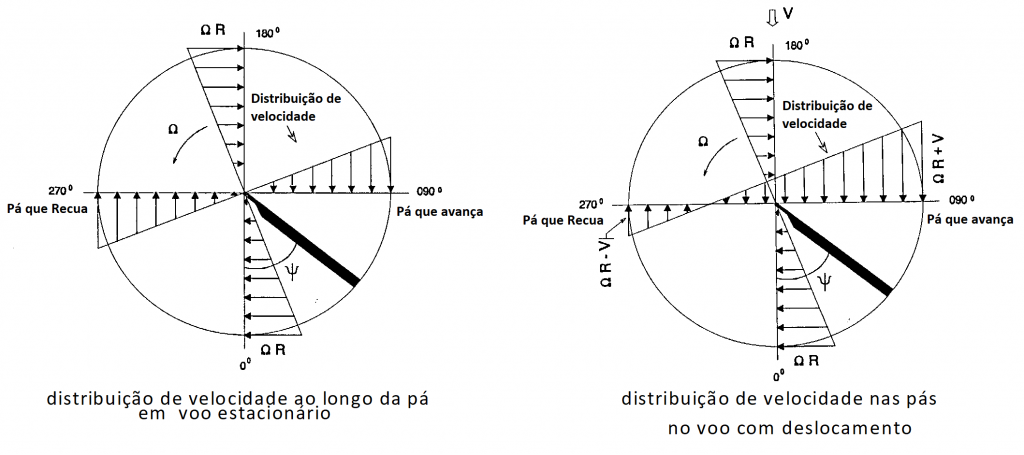
1.11 ASSIMETRIA DE SUSTENTAÇÃO: Quando se faz um voo pairado com vento calmo, a sustentação criada pelas pás do rotor em todas as posições radiais do disco é igual. A assimetria de sustentação é criada por voo horizontal ou por vento durante o pairado.
Esta assimetria resulta de sustentação diferencial desenvolvida pelos avanços e recuos das pás do disco do rotor. Durante o voo pairado com vento calmo, a velocidade da ponta de pá e de aproximadamente 700km/h em todos os pontos ao redor do plano de rotação.
Durante o voo à frente à 200km/h a velocidade da ponta das pás quando elas passam através do ponto A é 900km/h , velocidade da ponta da pá somada com a velocidade de deslocamento do helicóptero, e no ponto C é de 200km/h, velocidade da ponta da pá menos a velocidade do deslocamento.
Anteriormente foi explicado que, enquanto a velocidade sobre o aerofólio aumenta, a sustentação aumenta. Se nada for feito para corrigir esta diferença o helicóptero tenderá a tombar para a direita se o seu rotor girar no sentido horário, ou para esquerda se for anti-horário.
Os dois métodos mais comumente usados para a correção desta diferença de sustentação são: o uso de variação alternada do passo cíclico e o batimento das pás.
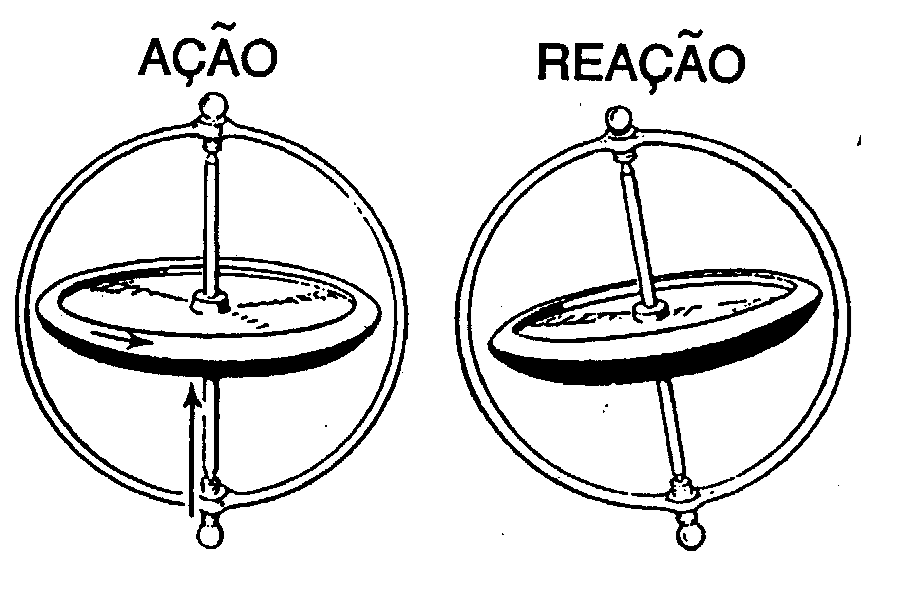
1.12 PRECESSÃO GIROSCÓPCA: A precessão giroscópca é um fenômeno que ocorre nas massas giratórias. Como um rotor é uma massa giratória também esta sujeito a este fenômeno.
Se aplicarmos uma força num dado ponto da massa giratória o efeito desta força só se manifestará 900 à frente onde ela foi aplicada.
1.13 BATIMENTO: O batimento das pás do rotor é resultado de duas forças: sustentação e força centrifuga.
Desde que a força centrifuga permaneça essencialmente constante durante o voo, o ângulo de batimento varia com a quantidade de sustentação gerada pela pá do rotor. Como o helicóptero voa
horizontalmente, a pá que avança desenvolve mais sustentação do que a pá que recua. Esta sustentação aumentada faz com que a pá bata para cima.
O movimento para cima diminui o ângulo de ataque da pá, o qual, por sua vez, diminui a quantidade de sustentação desenvolvida.
1.14 EFEITO DE CORIOLIS: Enquanto as pás batem da perpendicular e para cima elas estão mudando o seu centro de pressão.
Este movimento de batimento faz com que o centro de pressão da pá se desloque à medida que a mesma sobe, o centro de pressão se aproxima do mastro, fazendo assim, com que a pá tenha sua velocidade aumentada, com isto, a pá avança em relação a sua rotação normal do rotor principal, com este aumento de velocidade a força centrifuga também aumenta fazendo a pá então voltar a sua posição normal.
Este movimento de avanço e recuo da pá é absorvido pelos amortecedores nos rotores articulados, nos outros é a própria pá que absorve como esforço.
1.15 FORÇA CENTRÍFUGA: Uma das forças geradas nos rotores é a força centrífuga, que se pode definir como a força que tende a afastar a massa em rotação do seu centro de rotação, lançando-a na tangente à trajetória.
Outra força gerada é a força centrípeta, que contraria a centrífuga e tende a aproximar a massa rotativa do centro de rotação.
Nas aeronaves de asas rotativas (helicópteros e autogiros) a centrífuga é a força dominante no sistema rotor. Todas as outras tendem a modificar os efeitos desta força.
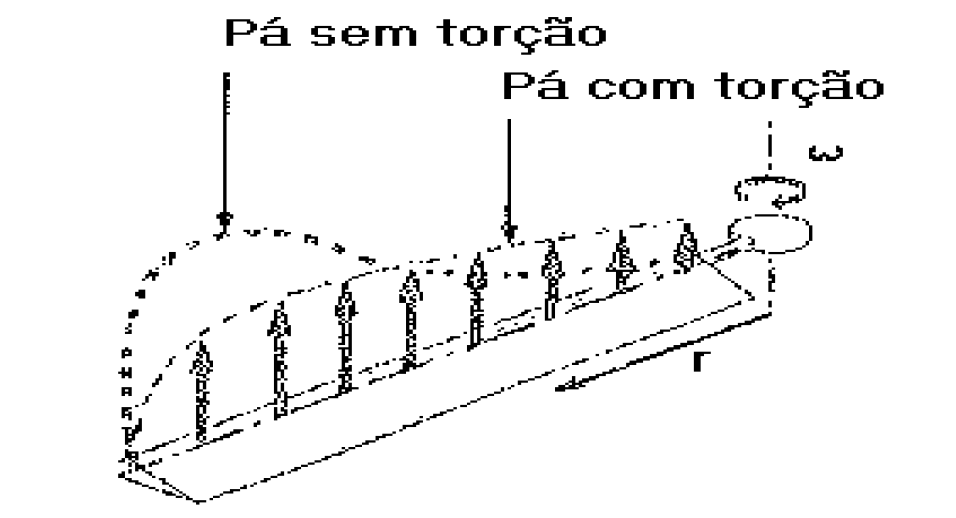
1.16 INFLUÊNCIA DA VARIAÇÃO DA VELOCIDADE TANGENCIAL AO LONGO DA PÁ: Da raiz à extremidade da pá, os raios de rotação dos elementos de pá aumentam.
A velocidade tangencial “V” dos elementos da pá aumentam proporcionalmente ao raio.
Se a velocidade “V” dos elementos de uma pá aumentam, da raiz à extremidade da pá, o valor das forças elementares dL e dD também aumentam.
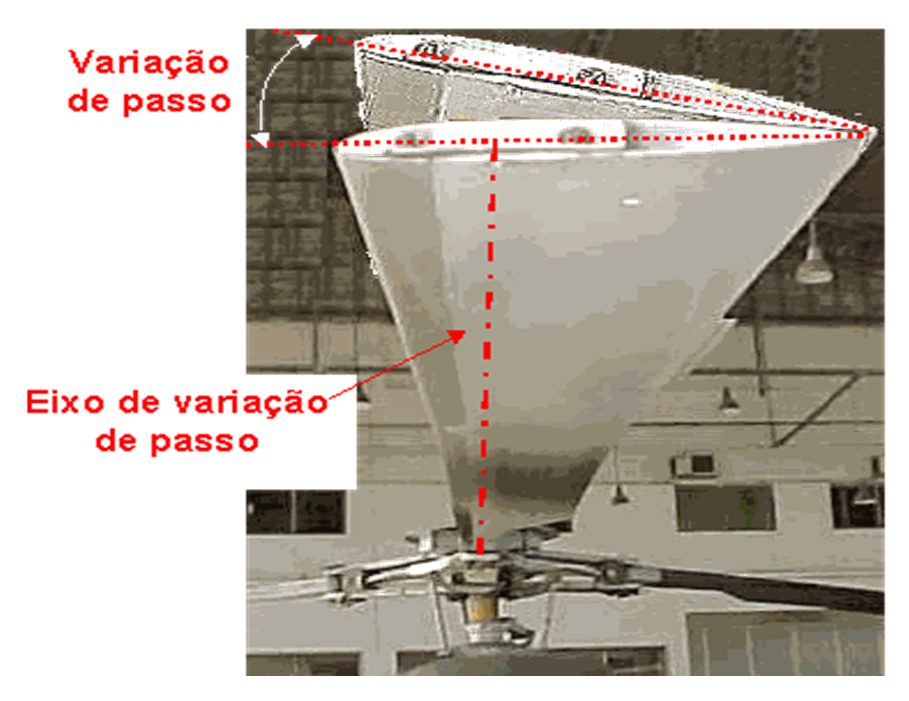
1.17 TORÇÃO DAS PÁS: As pás são torcidas entorno do seu eixo longitudinal de maneira que o ângulo de incidência seja grande na raiz e menor na ponta da pá.
1.18 EFEITO CONE: É o enflexamento das pás, resultante dos efeitos combinados das forças CENTRÍFUGA e de SUSTENTAÇÃO.
CARACTERÍSTICAS: Tende a aumentar em atitude de cabrada ou sempre que puxarmos G, é agravada se aeronave estiver com muito peso.
Tem a tendência de diminuir com o aumento da RPM das pás, aumento da força centrífuga. Tende a aumentar quando a aeronave é operada com rotações abaixo dos mínimos especificados pelo fabricante.
A MECÂNICA DO VOO DO HELICÓPTERO
- A MECÂNICA DO ROTOR: Um helicóptero encontra-se no seu estado de equilíbrio quando os vetores soma de todas as forças e de todos os momentos forem iguais a zero.
2.1 O ROTOR: Os rotores são os componentes mais importantes num helicóptero. São eles que garantem a sustentação, a translação e o controle do helicóptero.
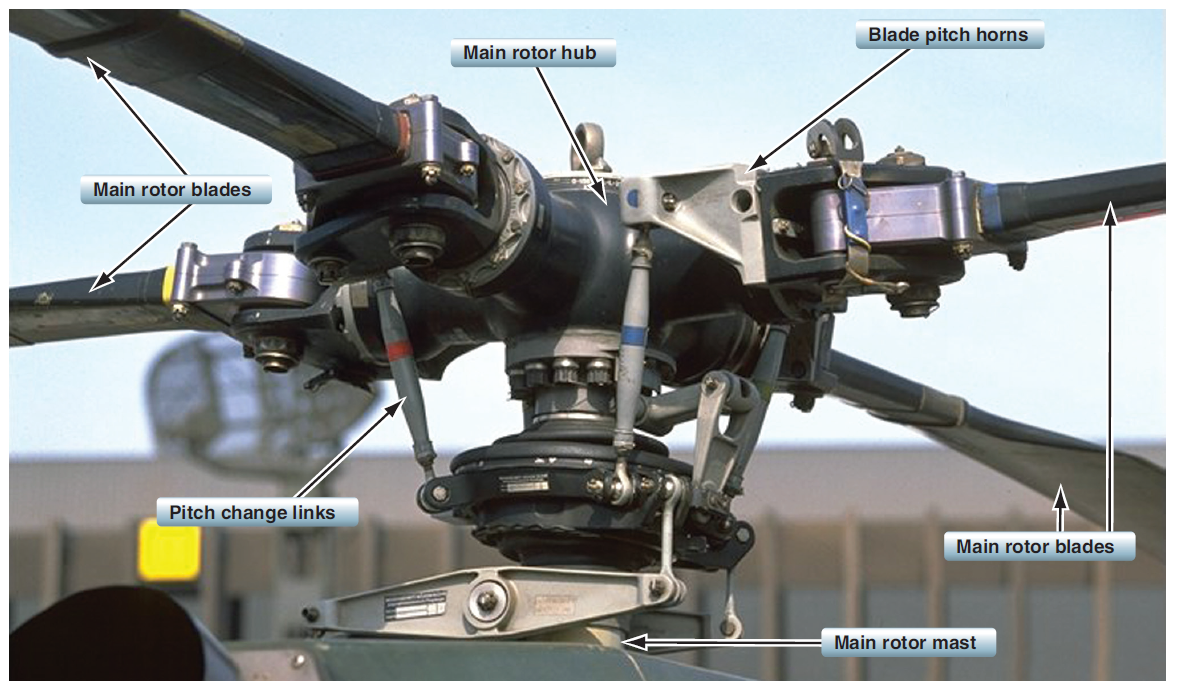
Um rotor compreende essencialmente:
A) Um mastro que é colocado em rotação através da força gerada por um ou mais motores;
B) Um cubo que assegura a cada pá três modalidades de liberdade (passo, batimento e arrasto). Em alguns casos estas três modalidades de liberdade são asseguradas pela própria pá, cabendo ao cubo do rotor apenas a função de ligação das pás ao mastro;
C) As pás (duas ou mais).
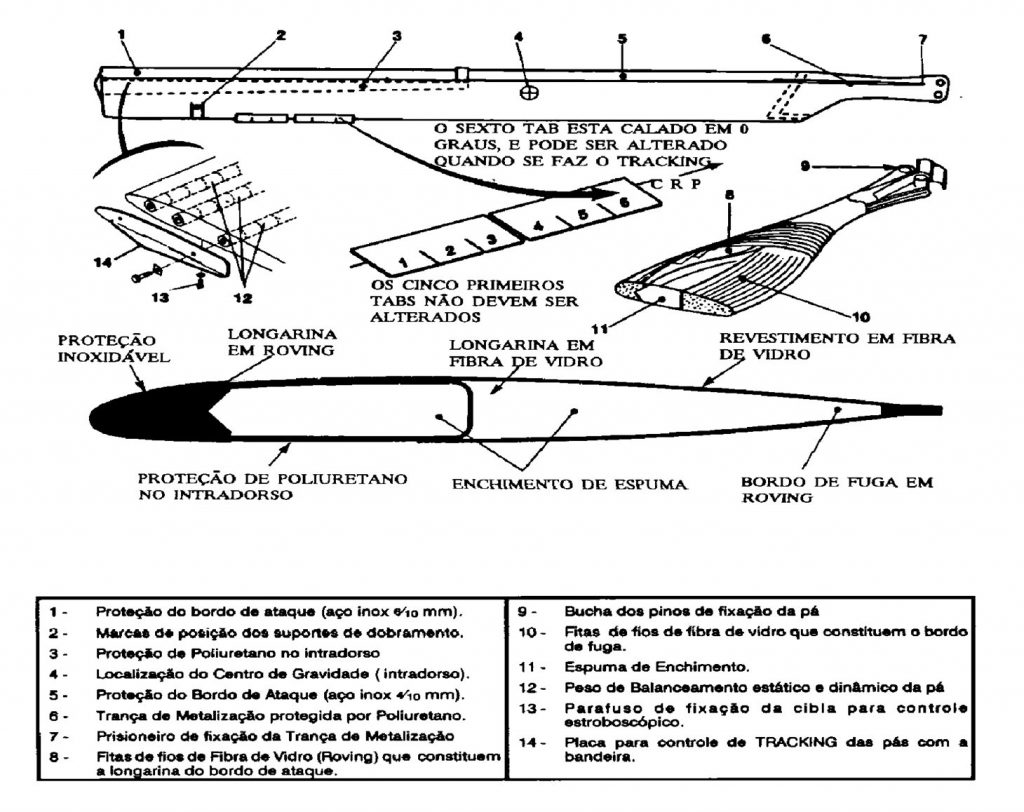
D) As pás dos rotores têm o bordo de ataque revestido com aço inox para evitar a erosão. Entre elas temos dois tipos: pás metálicas e as compostas.
As pás metálicas têm uma construção interna tipo “honey comb”, e externamente recebem um revestimento adesivo aplicado sob pressão e calor.
Elas são formadas por quatro seções: longarina principal; parte central (de “honey comb”); bordo de fuga (de liga de alumínio estrudado) e bloco da raiz (de liga de cobre estrudado).
No bordo de fuga na extremidade externa de cada pá existe uma chapa metálica que atua como compensador (TAB) e que permite a ajustagem da pista de rotação.
As pás compostas são formadas de acordo com a figura abaixo:
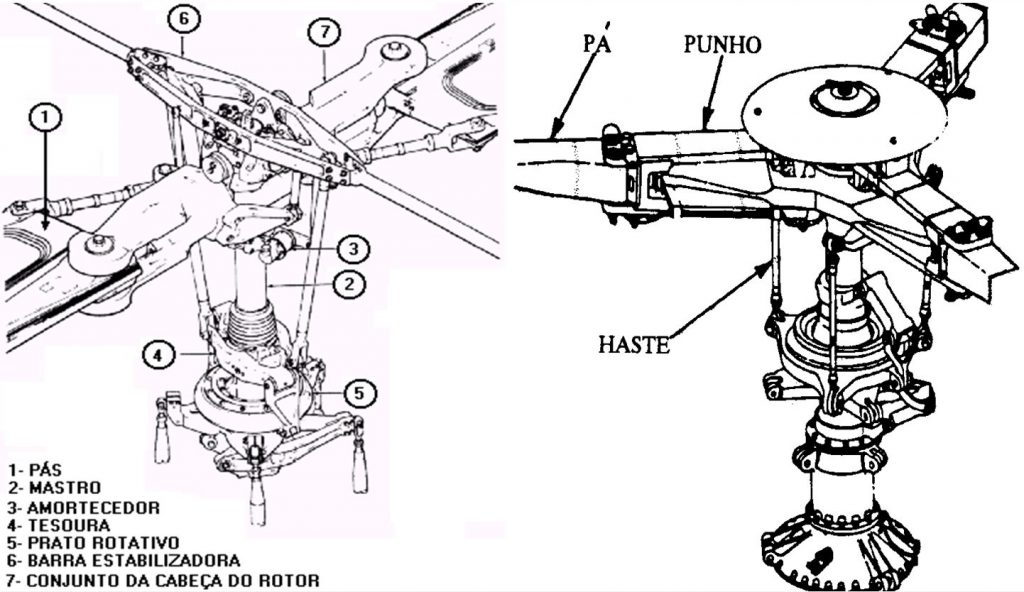
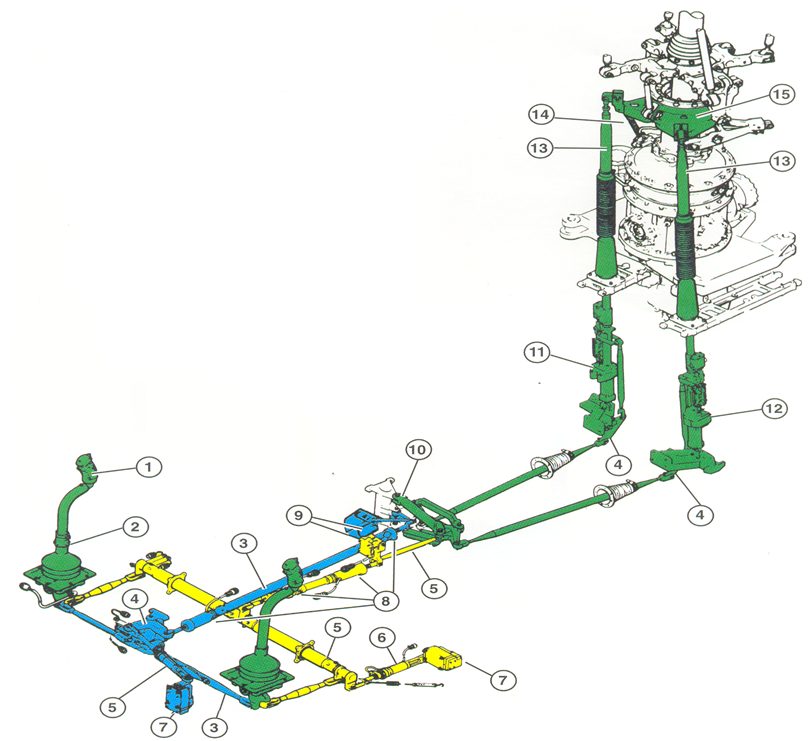
E) Prato oscilante (swhasplate) tem a finalidade de transmitir os comandos do cíclico às tesouras rotativas, que por sua vez atuarão nas hastes de comando fazendo com que ocorra a mudança cíclica dos ângulos das pás e consequente variação do plano do rotor para a direção desejada.
O prato oscilante é constituído de um prato rotativo (externo) e um prato fixo.
TIPO DE ROTORES
2.2 ROTORES RIGIDOS: São aqueles onde as pás, cabeça e mastro são rígidos entre si, possuem somente o movimento de mudança de passo, isto é, a pá do rotor se movimenta em torno do seu eixo longitudinal.

2.3 ROTORES SEMI-RÍGIDOS: São aqueles em que a cabeça e as pás são rígidas entre si executam os movimentos de mudança de passo e batimento.
Em algumas aeronaves este movimento se dá no conjunto por completo, é o movimento do disco do rotor como uma gangorra.
2.4 ROTORES ARTICULADOS: São aqueles rotores que tem três tipos de movimento, o de mudança de passo, o de batimento e avanço e recuo da pá, isto é, além dos outros já mencionados temos o movimento da pá em torno do seu eixo vertical, a pá vai a frente e atrás, ela se movimenta horizontalmente.
São necessárias 03 pás no mínimo para formar um rotor articulado.
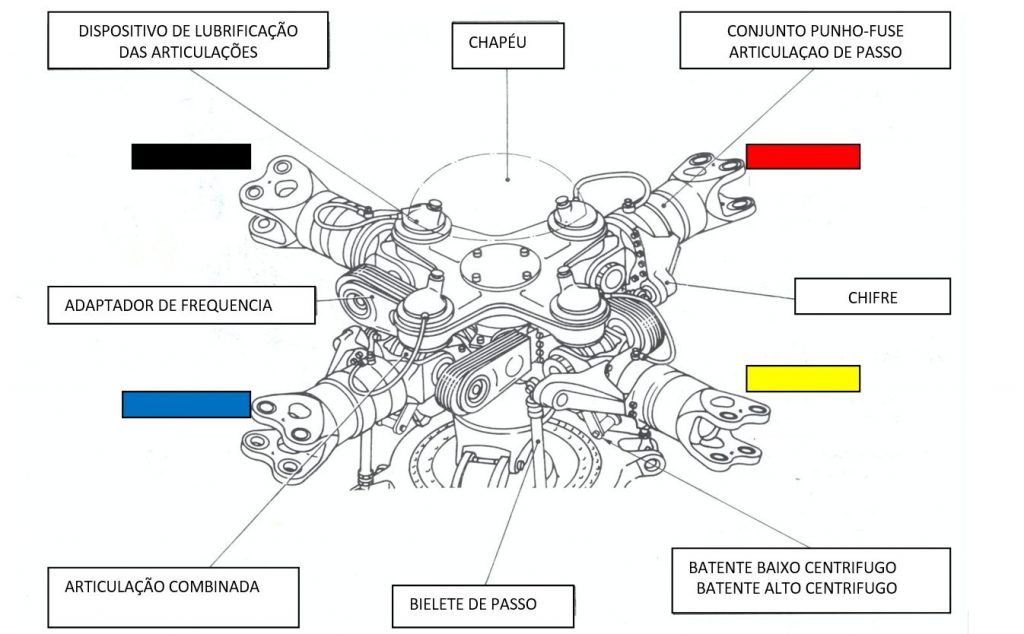
2.4.1 ARTICULAÇÃO DE PASSO: A articulação de passo é a mais importante de todas e tem duas funções essenciais:
A) Permitir um controle do módulo que através da variação idêntica do passo de todas as pás do rotor (passo coletivo).
É a função que assegura o movimento vertical do helicóptero;
B) Permitir um controle da direção através da variação cíclica do passo de cada pá (comando cíclico).
É a função que assegura a pilotagem do helicóptero.
2.4.2 ARTICULAÇÃO DE BATIMENTO: A força gerada por uma pá cria um momento fletor na mesma. Este momento causa grandes esforços no ponto de fixação da pá com o cubo do rotor, seria necessário super dimensionar estruturalmente este ponto para resistí-lo.
Para anular o momento fletor na raiz da pá, a solução largamente adotada é criar uma articulação no plano vertical (numa articulação o momento fletor é igual a zero).
Esta articulação em batimento pode ser real, com um eixo de articulação ou virtual, com a interposição entre a pá e o cubo feito de material flexível.

A articulação de batimento permite que a pá desloque-se para cima, substituindo o momento fletor por um movimento da pá.
Outra função desta articulação de batimento é anular o momento cabrador induzido pela assimetria de sustentação no rotor.
Curiosidade: o ângulo de batimento (β) de uma pá pode variar de 8 a 10°.
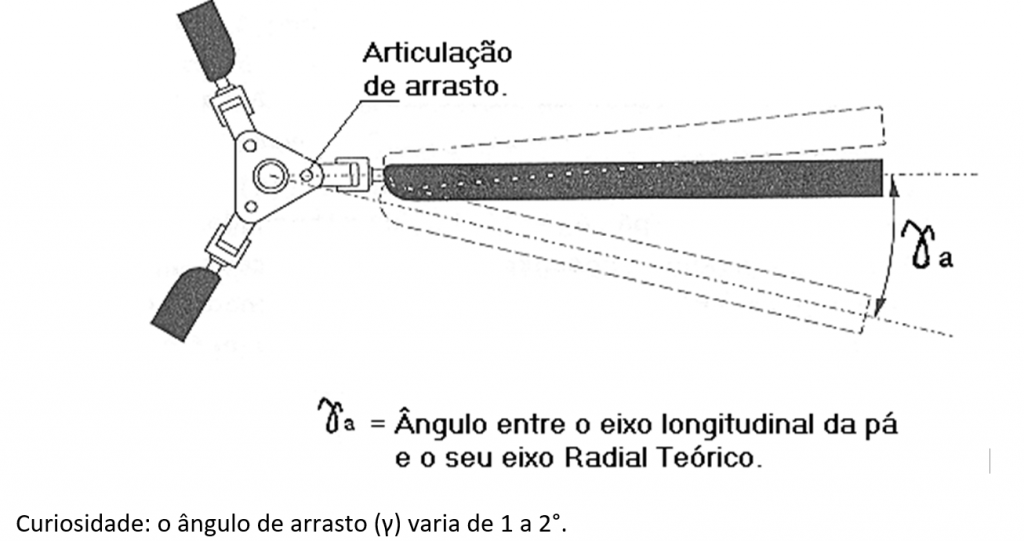
2.4.3 ARTICULAÇÃO DE ARRASTO: Princípio de Coriolis – um corpo em movimento giratório possui o produto de sua velocidade pela distância do seu centro de massa ao eixo de rotação como uma constante.
Caso a distância do centro de massa ao eixo de rotação varie, a velocidade também deverá variar a fim de manter esta igualdade.
Curiosidade: o giro de uma bailarina, aumentando sua velocidade ao trazer a perna para próximo do corpo, atende a este princípio.
Quando a pá executa o movimento de batimento, a trajetória do seu centro de massa é modificada e sua distância ao eixo de rotação diminui, na medida em que a pá sobe.
A velocidade tangencial varia em função da alteração desta distância, surgindo então o movimento de avanço e recuo da pá.
A cada giro, a pá é solicitada alternadamente em flexão horizontal. Na região da pá que avança o momento fletor é para frente. Na região da pá que recua o momento fletor é para trás.
Esses esforços alternados geram fadiga, principalmente na raiz da pá onde a amplitude é maior. Para anular o efeito dos momentos fletores na raiz da pá, é utilizada a articulação de arrasto.
Esta articulação permite que as pás oscilem horizontalmente em torno de uma posição média.
2.5 ROTOR DE CAUDA: O funcionamento do rotor de cauda obedece ao mesmo princípio do rotor principal, com as seguintes exceções:
- trabalha num plano vertical;
- as forças e momentos fletores são menores;
- não possui articulação de arrasto (a ligação “K” é suficiente para minimizar os efeitos do momento fletor em arrasto a um nível aceitável) e
- possui apenas o comando de passo coletivo (não há variação cíclica de passo).
CLASSIFICAÇÃO DOS ROTORES
3. ROTORES: Os rotores podem ser classificados da seguinte forma:
- ROTORES SIMPLES;
- ROTORES COAXIAIS;
- ROTORES LADO A LADO;
- ROTORES EM TANDEM.
3.1 ROTORES SIMPLES: São os rotores que possuem um rotor principal e um de cauda. O rotor principal esta montado em cima da cabine e o de cauda na parte traseira do cone de cauda.
3.1.1 ROTOR SIMPLES COM NOTAR: NOTAR (No Tail Rotor). Este sistema utiliza uma turbina para produzir um fluxo de ar que ira sair na parte traseira da cauda, orientado por alhetas, para dar direção ao fluxo de ar fazendo, assim, o trabalho do rotor de cauda.
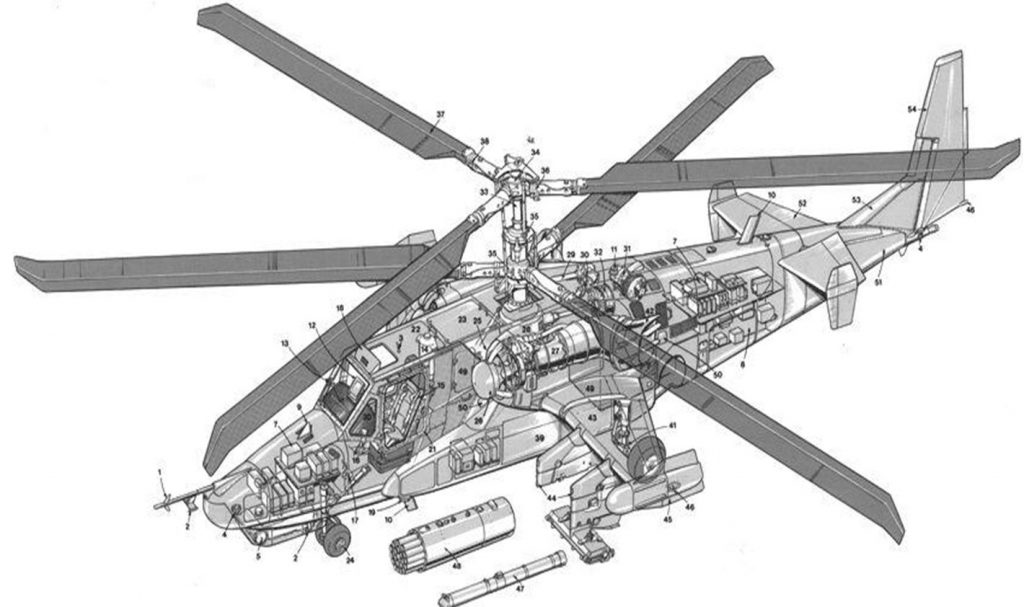
3.2 ROTORES COAXIAIS: São os rotores montados sobre postos, tem seu sentido de giro contra rotativo, isto é, cada rotor gira em um sentido.
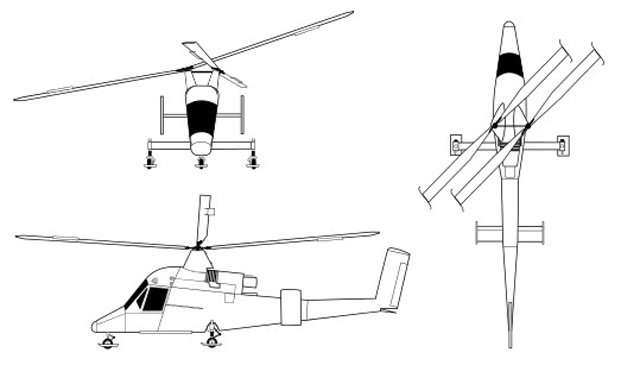
3.4 ROTORES LADO A LADO: São os rotores que estão montados sobre a cabine, geralmente, estão inclinados 450, são considerados entrelaçados, tem o seu sentido de giro contra rotativo.
Temos os rotores que estão dispostos lado a lado e não são entrelaçados.
3.5 ROTORES EM TANDEM: São os rotores que estão dispostos da seguinte forma: um na parte dianteira da aeronave e o outro esta na parte traseira, seu sentido de giro é contra rotativo e tem seu diâmetro igual, ficam dispostos em alturas diferentes na fuselagem.

As aeronaves que asseguram sua sustentação através de um rotor são chamadas de giro aviões e existem três tipos.
- AUTOGIRO: O rotor é montado livre em um eixo vertical e colocado em rotação pela ação do vento relativo. Esta aeronave não pode voar verticalmente nem manter um vôo pairado.
- GIRÓDINO: O rotor desta aeronave é acionado por um motor, assegurando a sustentação. A translação é conseguida por um propulsor; esta aeronave pode executar o vôo vertical.
- HELICÓPTERO: São aquelas aeronaves de asas rotativas cujo rotor assegura, simultaneamente, a sustentação e a translação.
SISTEMA TRANSMISSOR DE POTÊNCIA
4. Tem por finalidade transmitir a potência do motor com redução de RPM, para o eixo de acionamento da transmissão principal e seus acessórios como:
Mastro e rotor principal, eixos de acionamento do rotor de cauda, caixa de transmissão intermediária, caixa de 900 e rotor de cauda.
4.1TRANSMISSÃO PRINCIPAL: A caixa de transmissão principal recebe o movimento vindo do motor através de um eixo que está acoplado a ela, ou eixos quando a aeronave é bimotora, ou por meio de embreagens que irão transmitir este movimento por correias; ela transforma o movimento horizontal do motor em movimento vertical para o rotor principal.
A transmissão reduz a rotação de saída do motor para uma rotação ideal para melhor tração do rotor principal.
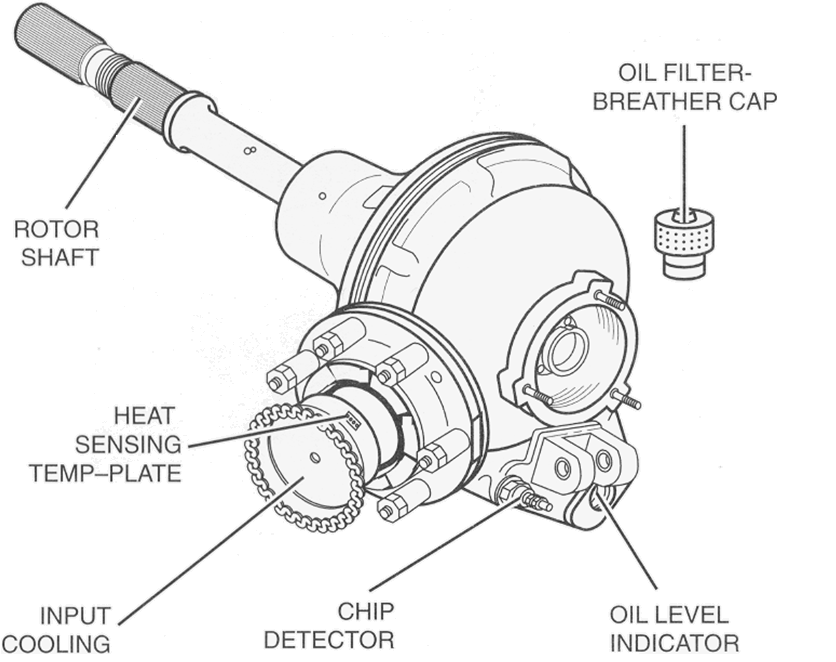
É lubrificada internamente por sistema próprio de lubrificação e junto a ela também estão acoplados o gerador principal, bomba hidráulica, taco gerador de rotação do rotor principal e uma saída para acionamento do rotor de cauda.
Nela esta instalada a roda livre, que é o componente responsável por proporcionar a auto-rotação.
A auto-rotação é o desacoplamento da transmissão principal com o motor em caso de falha do mesmo, proporcionando ao piloto executar a manobra ainda com recursos disponíveis para o vôo até o solo.
Esta manobra é conseguida porque aproveitamos a inércia do rotor que ora estava mandando o fluxo de ar de cima para baixo, agora invertendo o sentido, mantendo-se funcionando pelo ar que passa de baixo para cima.
CAIXA DE TRANSMISSÃO DE AERONAVE MONO MOTORA
CAIXA DE TRANSMISSÃO DE AERONAVE BIMOTORA
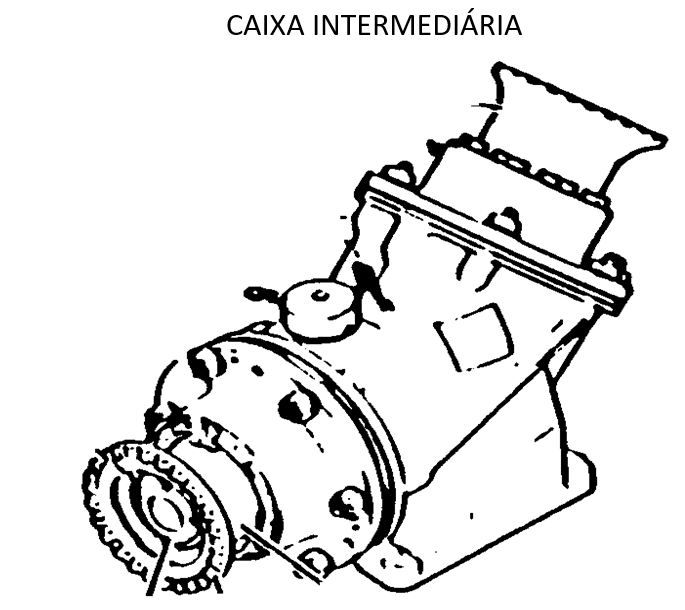
4.2 CAIXA DE TRANSMISSÃO INTERMEDIÁRIA: Esta caixa tem a função de mudar a inclinação do eixo do rotor de cauda em ângulos específicos de acordo com aeronave que ela estiver montada.
Ela em algumas aeronaves tem a função de reduzir rotação.Nem todas aeronaves tem esta caixa fazendo parte do conjunto de transmissão.
Geralmente sua lubrificação é por salpique.
4.3 CAIXA DE TRANSMISSÃO TRASEIRA (CAIXA DE 900): Esta caixa tem a importante função de mudar em 90º o ângulo de rotação do eixo de acionamento do rotor de cauda.
Ela também reduz a rotação do eixo para o rotor de acordo com o projeto da aeronave. É também lubrificada por salpique.
COMANDOS DE VOO
5. Os comandos de vôo compreendem os seguintes sistemas: sistema de comando coletivo; sistema de comando cíclico; sistema de profundor sincronizado e sistema de comando do rotor de cauda.
Os sistemas de comando de vôo são mecânicos e têm a finalidade de proverem o controle da atitude e direção de voo.

5.1 SISTEMA COLETIVO: O comando coletivo é o comando primário de altura, ele atua na mudança de passo da pás do rotor principal.
As pás mudam de ângulo todas ao mesmo tempo e em proporções iguais. Ângulo de passo ou simplesmente passo é o ângulo dado pela rotação da pá em torno do seu eixo longitudinal. É o comando secundário de velocidade.
Nas aeronaves com motor a pistão é no coletivo que fica a manete de aceleração (baixa o coletivo diminui a aceleração e vise versa).
Aeronaves com motor a reação a manete de aceleração também fica no coletivo, porém a rotação é controlada por meio de compensadores automáticos instalado no controlador de combustível.
Quando na aplicação do comando coletivo existe o aumento do passo das pás causando um maior arrasto que por sua vez fará com que a fuselagem tenha a tendência de girar no sentido contrario ao do rotor principal, que é contrariado pelo comando dos pedais no rotor de cauda.

5.2 SISTEMA CÍCLICO: O comando cíclico é o comando primário de velocidade e secundário de altura.
Ele atua no passo das pás do rotor principal com a mudança de ângulo em proporções diferentes ao redor do disco do rotor.
Esta diferença no ângulo das pás no disco causa o batimento do rotor fazendo com que a aeronave se desloque conforme o seu movimento.
No comando cíclico a aeronave gira em torno de seu eixo longitudinal e lateral. Quando se atua no cíclico as pás opostas se alteram do mesmo ângulo de passo, porém em sentidos contrários.
5.3 SISTEMA DOS PEDAIS (ANTI-TORQUE): Observado de cima, o rotor principal tem um movimento de rotação para a esquerda.
O torque que imprime este movimento ao rotor causaria, por reação, um giro da fuselagem no sentido contrário.
Para que isto não aconteça, foi incorporado um outro rotor vertical e na extremidade do cone de cauda que, por seu braço de alavanca em relação ao mastro (centro de rotação do R /P), pode compensar aquela reação com potência bem menor.
O anti-torque, instalado do lado direito da cauda, direção em que deve puxá-la, é, por isto, denominado como sendo do tipo de “tração”.
O torque do rotor principal aumenta, ou diminui, em proporção direta ao passo do coletivo (subindo ou descendo o coletivo).
O rotor de cauda, portanto, deve também variar sua potência para cumprir sua função.
Ele faz isso mudando coletivamente o ângulo de ataque (passo) das suas pás, aumentando ou diminuindo a quantidade total do empuxo desenvolvido para contrabalançar o torque do rotor principal.
A amplitude da mudança do passo do rotor de cauda é controlada pelos pedais na cabine e, na prática, fornecem um controle da proa no pairado e um voo compensado (coordenado “bola no meio”), em cruzeiro.

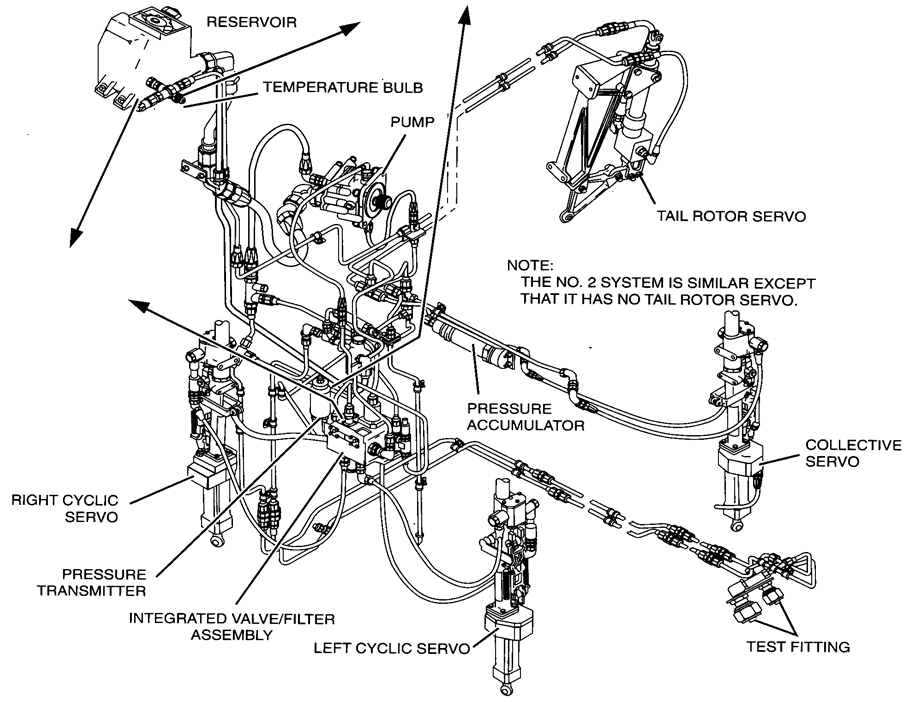
SISTEMA HIDRÁULICO
6. SISTEMA HIDRÁULICO: O sistema hidráulico tem por finalidade reforçar os comandos de voo, suavizando os esforços de pilotagem, atua nos trens de pouso, para aquelas aeronaves que tem o sistema retrátil, no sistema de freio rotor e das rodas.
Sua outra função é contrabalançar a realimentação dinâmica causada pelas forças externas que incidem nos rotores durante o voo.
Suas vantagens são: pouco peso, facilidade de inspeção, requisitos mínimos de manutenção, grande eficiência e confiabilidade.
Os servos atuadores hidráulicos são montados na linha das conexões mecânicas dos comandos de voo, entre a cabine e os controles rotativos dos rotores.
Os sistemas hidráulicos podem ser simples ou duplos, e podem ter outro sistema para emergência.
SISTEMA DE TREM DE POUSO
7. TREM DE POUSO: tem por finalidade apoiar a aeronave no solo.
O tipo esquis era o mais usado, porém, os helicópteros modernos estão utilizando trem de pouso do tipo retrátil e escamoteáveis sendo também utilizados os trens fixos que podem ser de rodas ou esquis.
Algumas aeronaves também estão equipadas com flutuadores para pouso na água e em emergência.
7.1 TIPO ESQUIS: São os trens formados por arcos transversais conectados a dois tubos longitudinais.

7.2 TREM FIXO COM RODAS: São os trens de pouso que utilizam rodas e amortecedores para apoiarem a aeronave no solo, mas são fixos.
7.3 TREM DE POUSO RETRATEIS: São os trens que se distendeme retraem, porém, não ficando totalmente recolhidos, isto é, as rodas ficam com uma parte aparecendo no seu alojamento.

7.4 TREM DE POUSO ESCAMOTEÁVEIS: São aqueles que ao serem retraídos ficam totalmente escondidos.

7.5 TREM DE POUSO TIPO FLUTUADOR: São equipadas as aeronaves com este tipo de trem aquelas que tem o objetivo de pousarem na água.

VIBRAÇÕES
8. VIBRAÇÕES: As vibrações são características comuns nas aeronaves de asas rotativas, pelo elevado número de partes móveis.
Por esta razão, o problema é decidir quando o nível de vibração torna-se inaceitável.
As vibrações são classificadas por sua frequência, ou melhor, em função do número de vezes que ocorrem durante uma volta completa (revolução) do rotor principal. Exemplos: 1 / REV. ; 2 / REV. ; 4 / REV. etc.
As únicas fontes de vibrações, de qualquer frequência, são as peças rotativas ou móveis do helicóptero ou outras peças vibrando em conseqüência de vibrações já existentes.
A vibração típica de rotor principal, baixa frequência (1/REV), costuma apresentar dois modos: vibrações verticais e laterais.
As pás dos rotores, quando forem balanceadas, recebem uma cor para facilitar a correção a ser feita. Nos rotores de múltiplas pás, as cores, comumente usadas, são: AMARELA, AZUL, PRETA e VERMELHA.
8.1 VIBRAÇÃO VERTICAL: A vibração vertical é causada por uma pá mais alta do que outra no mesmo ponto. Isto é chamado de pá fora de “pista” (ou track denominação inglesa).
A vibração vertical costuma aumentar com a velocidade. Para a correção devemos mexer nos compensadores (TAB’S).
8.2 VIBRAÇÃO LATERAL: A vibração lateral pode ser, via de regra, causada por desbalanceamento no sentido do comprimento da pá (diferença de pesos entre pás); ou pelo alinhamento do CG da pá, relativo ao eixo longitudinal que afeta o balanceamento no sentido da corda.
As vibrações laterais são mais acentuadas no pairado e pioram com a redução de RPM.
Nas vibrações verticais a impressão é que os tripulantes vibram em conjunto, enquanto na lateral ficam defasados.
Para ajustar o rotor há que se seguir um processo detalhado, desde o balanceamento estático, dentro do hangar, com portas fechadas, até os variados tipos de ajustes feitos entre voos de teste.
Para simplificar, as vibrações são arbitrariamente divididas como se segue.
8.3 VIBRAÇÕES EXTREMAMENTE BAIXAS: Menos de 1/rev.
8.4 VIBRAÇÕES BAIXA: 1 ou 2 vibrações/rev. Rotor principal.
8.5 VIBRAÇÕES MÉDIA: 4,5 ou 6 vibrações/rev. Folga em componente.
8.6 VIBRAÇÕES ALTA: 7 ou mais vibrações/rev. Rotor de cauda.
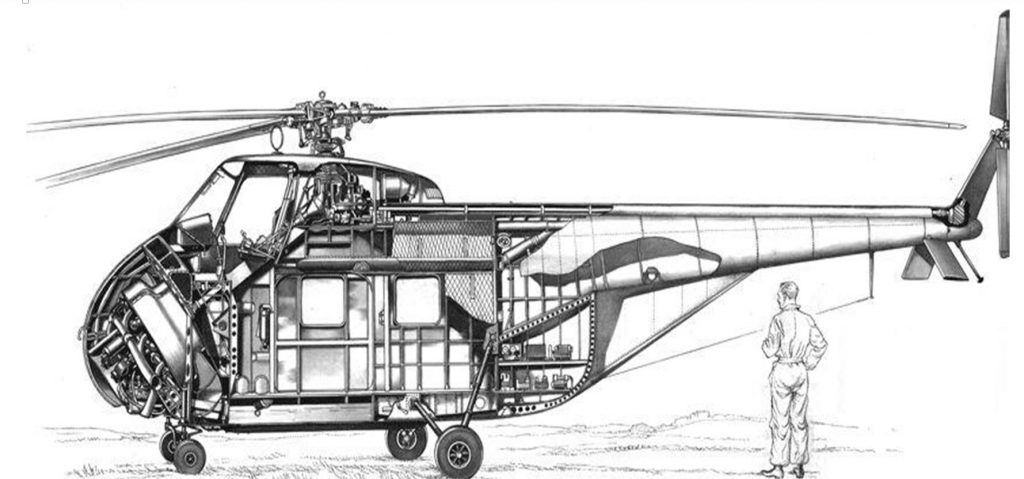
ESTRUTURAS
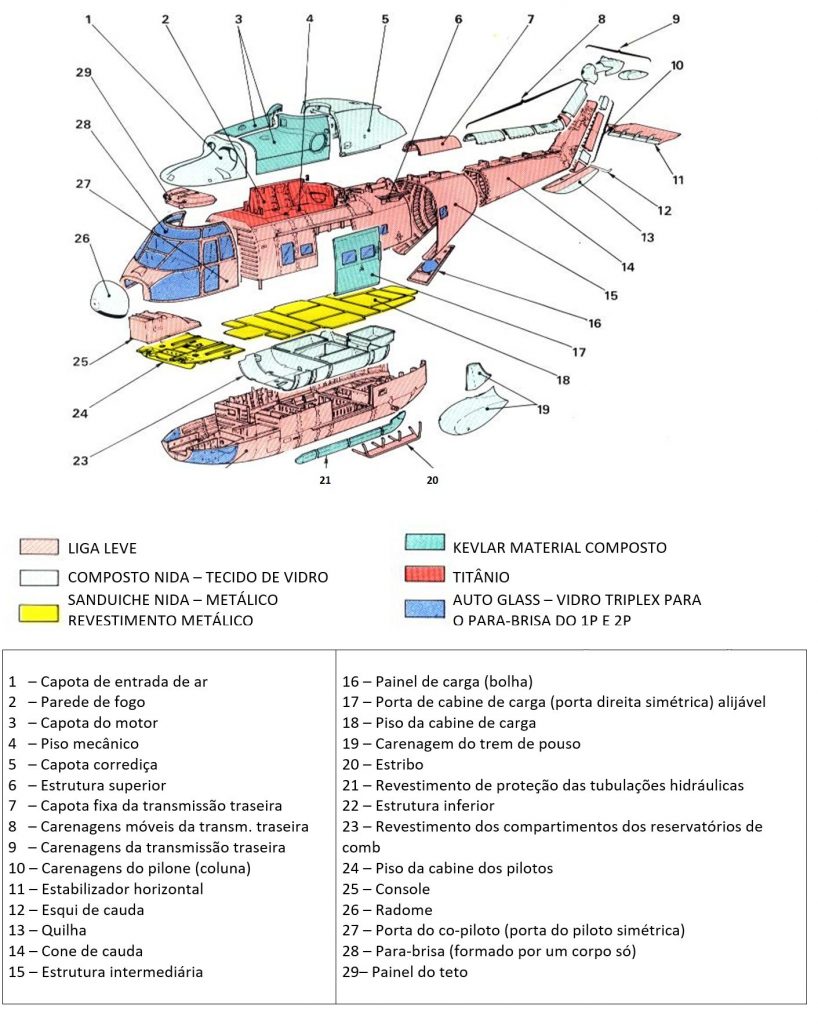
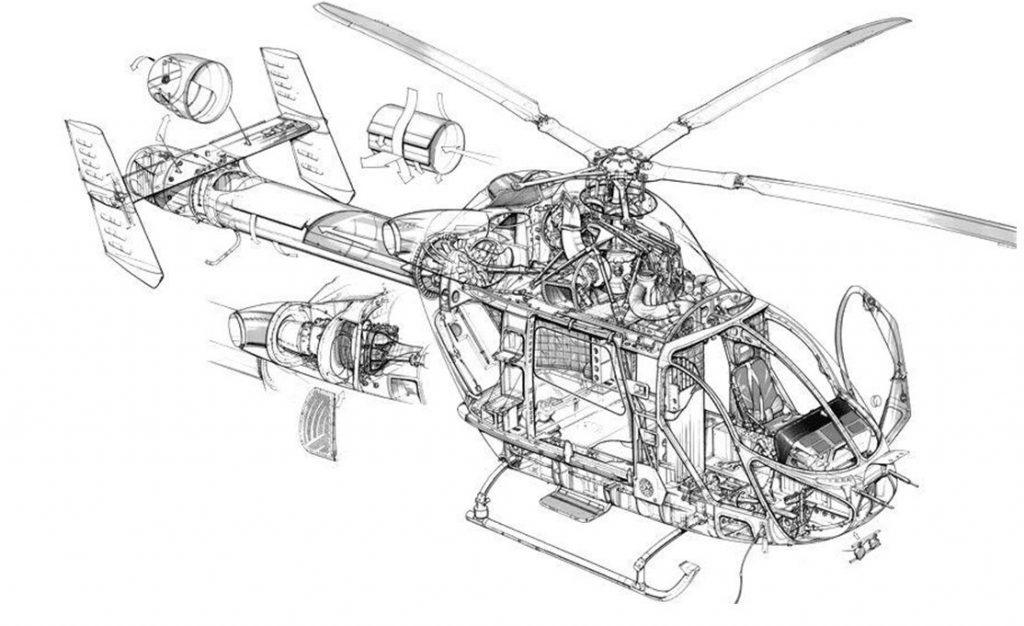
9. ESTRUTURA DA AERONAVE: Tal como a fuselagem de aeronaves de asa fixa, a fuselagem de helicópteros podem ser formadas por uma treliça de tubos soldados ou alguma forma de construção monocoque.
Apesar de suas configurações de fuselagem variar muito, na maioria das fuselagens de helicóptero utilizam membros estruturais semelhantes aos usados nas aeronaves de asa fixas.
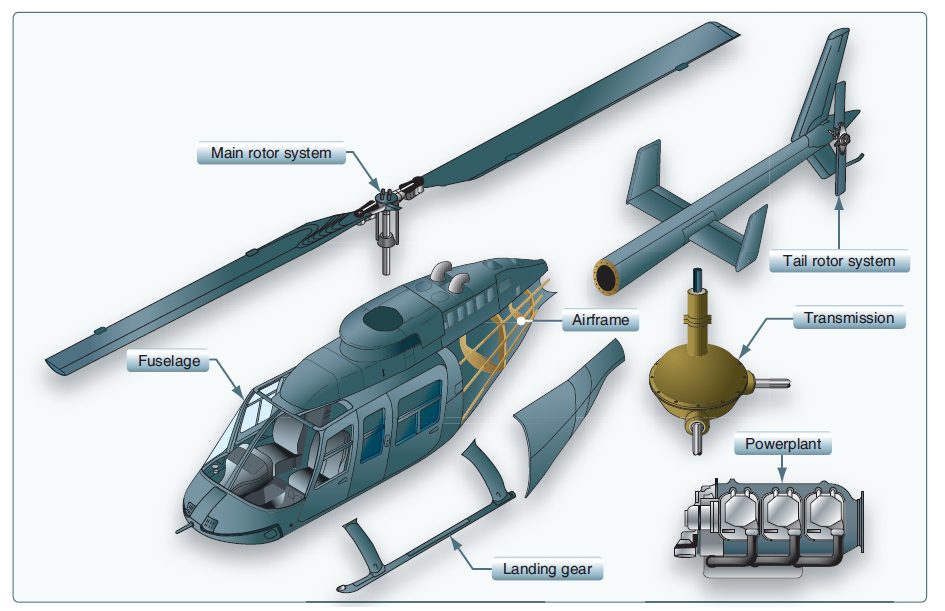
É na estrutura que estão fixados os motores, a cabine, a caixa de transmissão principal, trem de pouso, rotor principal, rotor de cauda, deriva vertical e horizontal, cone de cauda e bequilha de proteção.
As estruturas capazes de suportar esforços são feitas de aço cromo molibdênio, paredes e pisos de helicóptero, na maioria, são feitas de honey-comb e na cauda tem a bequilha de proteção, cuja função, é proteger o rotor de cauda.
Os helicópteros com a cauda em armação metálica são mais leves que as de estruturas monocoque e semi-monocoque, tendo ainda um óleo de mamona no seu interior para facilitar a visualização de possíveis rachaduras que, por ventura, possam aparecer nas soldas de união da estrutura; desta forma facilitando as inspeções.
As estruturas dos helicópteros estão divididas em seção dianteira, central e traseira, ou somente dianteira e traseira.
A seção traseira dos helicópteros é fixada a seção dianteira por meio de parafusos.

9.1 PESO E BALANCEAMENTO: A maioria dos helicópteros tem o C.G. mais restrito que os aviões. Em alguns casos o passeio do C.G está dentro de 03 (três ) polegadas.
A localização e o comprimento exato do passeio do C.G. são determinados para cada helicóptero. Normalmente ficam próximo a transmissão principal, ou de um centróide em caso de um sistema de rotor duplo
EQUIPAMENTOS AUXILIARES
10 EQUIPAMENTOS AUXILIARES: Os helicópteros são fabricados com diversas finalidades.
Algumas destas faz-sê necessário a utilização de equipamentos auxiliares que irão proporcionar a realização da função a qual a aeronave esta sendo aplicada.
Estes equipamentos são: Guincho de resgate, Gancho de carga e espelhos.
[ninja-inline id=715]
10.1 Guincho de resgate: É utilizado para içar ou baixar pessoas em condições onde o helicóptero não pode executar o pouso; muito utilizado para resgate em terrenos alagados ou irregulares.

10.2 Gancho de carga: É utilizado para transportar cargas externas, cargas estas que por terem um volume maior que a cabine de carga do helicóptero, são transportadas na parte externa da anv.

10.3 Espelhos: Os helicópteros também podem ser equipados com espelhos para auxiliar o piloto na execução de voos em áreas restritas e transporte de cargas externas.

DOWNLOAD APOSTILA COMPLETA
[wpfd_category id=”399″]

BIOGRAFIA
MANUAL DE MANUTENÇÃO BÁSICO DO H-1H, BELL 205.
MANUAL DE MANUTENÇÃO BÁSICO DO BELL 412.
MAMEC 7º/8º GAV.
MAMEC/MAITE H-50/VH-55.ESQUILO. GTE.
MAMEC/MAITE CH-34/VH-34 SUPER PUMA. GTE.
MANUAIS DE MANUTENÇÃO (HELICÓPTEROS) ARMY, USA.
TM-1-70-36-10 OPERATOR’S MANUAL (SIKORSKI).
TM-1-70-VIB VIBRATION MANUAL (SIKORSKI).
FOTOS ACERVO PESSOAL.
GLOSSÁRIO — Teoria sobre Helicóptero (para estudantes)
Aerodinâmica
Estudo das forças que atuam no helicóptero quando o ar escoa pelas pás do rotor, determinando sustentação, arrasto e comportamento em voo.
Aerofólio
Superfície com formato que gera sustentação ou tração quando o ar passa por ela; no helicóptero, as pás do rotor são aerofólios.
Ângulo de ataque
Ângulo entre a linha de corda da pá e o vento relativo. Controlado pelo piloto via cíclico e coletivo; influencia diretamente sustentação e arrasto.
Ângulo de incidência
Ângulo entre a linha de corda da pá e o plano de rotação do rotor. Diferente do ângulo de ataque (que é em relação ao vento relativo).
Anti-torque
Conjunto de forças/recursos que neutralizam o torque do rotor principal. Normalmente é o trabalho do rotor de cauda, mantendo o nariz estável.
Articulação de batimento
Eixo (real ou “flexível”) que permite à pá mover-se para cima/baixo, aliviando momentos fletores e ajudando a compensar assimetrias de sustentação.
Articulação de passo
Permite variar o ângulo de passo de cada pá (coletivo e cíclico), controlando subida/descida e direção.
Arrasto
Força que se opõe ao movimento no ar. Cresce com o aumento do ângulo de ataque, exigindo mais potência do motor.
Atrito (fricção)
Resistência de contato entre superfícies em movimento relativo; contribui para perdas e aquecimento em componentes.
Batimento (flap)
Movimento vertical periódico das pás (para cima/baixo) em resposta a diferenças de sustentação entre pá avançante e recuante.
Bordo de ataque
A aresta frontal da pá; costuma ter reforço (ex.: aço inox) para resistir à erosão.
Bordo de fuga
A aresta traseira da pá; pode receber pequenos tabs/compensadores para ajustar a pista de rotação (track).
Centro de pressão
Ponto da pá onde atua a resultante aerodinâmica. Pode deslocar-se com variações de ângulo e batimento.
Ciclo (da pá)
Percurso completo de cada pá ao redor do disco do rotor; ao longo do ciclo, ângulo de ataque e cargas variam constantemente.
Coletivo (passo coletivo)
Comando que altera simultaneamente o passo de todas as pás. Aumenta/diminui sustentação do rotor principal (sobe/desce).
Compensador (tab)
Pequena chapa ajustável no bordo de fuga que ajuda a “trimar” forças e ajustar a pista de rotação da pá.
Corda (linha de corda)
Reta que liga bordo de ataque ao bordo de fuga. Serve de referência para ângulos e medições do perfil.
Deriva (derivação lateral)
Tendência do helicóptero a deslocar-se lateralmente devido ao anti-torque e fluxo do rotor de cauda; é compensada por projeto (inclinação do mastro) e comandos.
Disco do rotor
Área circular varrida pelas pás em rotação. A orientação desse plano muda com o cíclico.
Efeito cone
Curvatura (enflexamento) das pás para cima pela soma de sustentação e força centrífuga; aumenta com peso/G e rotações baixas.
Efeito Coriolis
Variação na velocidade angular da pá quando o centro de massa se aproxima/afasta do mastro durante o batimento; afeta o equilíbrio do rotor.
Equilíbrio (estático/dinâmico)
Condição em que somas de forças e momentos se anulam, mantendo voo suave; desequilíbrios causam vibração.
Força centrífuga
Tende a “puxar” a pá para fora do centro durante a rotação. É dominante no rotor e contrabalançada pela centrípeta.
Força centrípeta
Atrai a massa girante em direção ao centro de rotação, equilibrando a centrífuga.
Honeycomb (colmeia)
Estrutura interna leve e rígida usada em pás metálicas/compostas para resistência com baixo peso.
Longarina (da pá)
Elemento estrutural principal da pá, responsável por suportar cargas e distribuir esforços.
Mastro do rotor
Eixo que transmite potência do motor ao cubo/pás. Pode ter leve inclinação para ajudar a compensar deriva.
Momento fletor
Tendência de curvar a pá no seu ponto de fixação. É reduzido pelo uso de articulação de batimento.
Passo cíclico (cíclico)
Comando que muda ciclicamente o passo de cada pá ao redor do disco, inclinando o plano do rotor e direcionando o voo.
Passo coletivo
Ver “Coletivo”. Ação simultânea sobre todas as pás para controlar sustentação total do rotor.
Potência (do motor)
Energia fornecida para vencer arrasto e manter rotação adequada do rotor; demandas sobem com ângulo de ataque e arrasto.
Prato oscilante (swashplate)
Conjunto com parte fixa e parte rotativa que transmite os comandos do cíclico/colletivo às pás, mudando seus ângulos ao longo do ciclo.
Precessão giroscópica
Fenômeno em massas girantes em que a resposta à força aplicada aparece cerca de 90° adiante na rotação; relevante ao controle do rotor.
Raiz da pá
Região de fixação da pá ao cubo; concentra esforços e recebe reforços/encaixes.
Rotor (principal)
Conjunto mastro–cubo–pás que gera sustentação e tração. Pode ser rígido, semi-rígido ou articulado.
Rotor de cauda
Rotor menor que fornece anti-torque e controle de guinada, ajudando também na compensação da deriva lateral.
Rotores articulados
Têm três movimentos: passo, batimento e avanço/recuo (arrasto da pá), permitindo maior “liberdade” às pás.
Rotores rígidos
Pás, cabeça e mastro formam conjunto rígido; as pás variam apenas o passo (sem eixos de batimento/arrasto).
Rotores semi-rígidos
Cabeça e pás rígidas entre si, com mudança de passo e batimento do conjunto (como uma gangorra).
Sustentação
Componente da força aerodinâmica perpendicular ao vento relativo; aumenta (até o estol) com ângulo de ataque e velocidade.
Torção das pás
Variação intencional do ângulo ao longo do comprimento (maior na raiz, menor na ponta) para distribuir cargas e eficiência.
Torque
Reação da fuselagem ao giro do rotor principal; sem compensação, faria a aeronave girar no sentido oposto às pás.
Velocidade tangencial (da pá)
Velocidade de cada elemento da pá devido à rotação; cresce do centro para a ponta, influenciando sustentação e arrasto.
Vento relativo
Fluxo de ar “encontrado” pela pá; é sempre oposto ao movimento do aerofólio.
FAQ — Perguntas Frequentes
P: Qual a diferença entre ângulo de ataque e ângulo de incidência?
R: Ângulo de ataque é entre a corda da pá e o vento relativo (muda com a atitude/controle). Ângulo de incidência é entre a corda e o plano de rotação (característica geométrica do rotor).
P: Por que o helicóptero tende a girar no sentido oposto ao rotor principal?
R: Pelo torque: ao girar o rotor numa direção, a fuselagem reage tentando girar na outra. O rotor de cauda fornece anti-torque para neutralizar isso.
P: O que causa a assimetria de sustentação e como é compensada?
R: Em voo à frente, a pá avançante “sente” maior velocidade do ar que a recuante. Compensa-se com passo cíclico alternado e batimento das pás.
P: O que é precessão giroscópica e como afeta o controle?
R: Em massas girantes, o efeito da força aplicada aparece 90° adiante. No rotor, isso muda como os comandos se traduzem em inclinação do disco.
P: Para que servem coletivo e cíclico?
R: O coletivo varia o passo de todas as pás (sobe/desce). O cíclico varia o passo ao longo do ciclo, inclinando o disco e conduzindo a aeronave.
P: Quando o ângulo de ataque é “demais” e o que acontece?
R: Ao ultrapassar o ângulo de estol, a pá perde sustentação e o arrasto cresce muito. Isso pode reduzir a RPM do rotor e degradar o controle.
P: Por que existe torção nas pás?
R: Para manter distribuição de sustentação mais uniforme e evitar cargas excessivas na ponta, melhorando eficiência e vibração.
P: O que é efeito cone e quando aumenta?
R: É a curvatura das pás para cima por sustentação + centrífuga. Aumenta com peso/G e com RPM abaixo do recomendado.
P: Qual a função do prato oscilante?
R: Transmitir comandos do cíclico e do coletivo às pás, variando seus ângulos e a orientação do plano do rotor.
P: Diferença entre rotores rígidos, semi-rígidos e articulados?
R: Rígidos: sem eixos de batimento/arrasto (só passo). Semi-rígidos: batimento em “gangorra” do conjunto. Articulados: passo, batimento e avanço/recuo por pá.
P: O que é batimento das pás e por que ocorre?
R: É o movimento vertical das pás causado por diferenças de sustentação; a avançante bate para cima, a recuante para baixo, equilibrando cargas.
P: Como o projeto ajuda a reduzir deriva lateral?
R: Alguns helicópteros inclinam levemente o mastro do rotor principal para compensar a deriva; o restante vem do controle via cíclico.
P: Por que a ponta da pá “trabalha” mais?
R: A velocidade tangencial cresce com o raio; na ponta, a velocidade relativa é maior, gerando mais sustentação e também mais arrasto.
P: Por que o bordo de ataque tem reforço?
R: Para resistir a erosão por impacto com partículas/chuva e manter o perfil do aerofólio, preservando desempenho.
P: Como potência, sustentação e arrasto se relacionam?
R: Aumentar ângulo de ataque eleva sustentação até o estol, mas também eleva arrasto; mais arrasto exige mais potência para manter a RPM e o desempenho.
P: O que é “pista de rotação” e para que serve o tab?
R: É o ajuste para que todas as pás “voem” no mesmo plano, reduzindo vibração. O tab no bordo de fuga ajuda nesses ajustes finos.
P: O rotor de cauda faz só anti-torque?
R: Principalmente, mas também contribui para controlar a guinada e auxiliar na compensação de deriva lateral.
P: Como sei que o helicóptero está em equilíbrio?
R: Quando as somas de forças e momentos são zero, sem tendências de girar, vibrar ou inclinar indevidamente — voo suave e controlado.

Artigos Relacionados



1 Comentário
Excelente trabalho, muito bom !
Obrigado!