Do Mecânico ao Inteligente: A Revolução do Fly-by-Wire e o Futuro com o IFCS
A aviação moderna é definida pela sua incrível segurança e performance, conquistas que resultam de décadas de inovação contínua. Uma das transformações mais significativas na história da tecnologia aeronáutica foi a transição dos sistemas de controle de voo mecânicos para os sistemas digitais, conhecidos como Fly-by-Wire (FBW). Esta tecnologia substituiu as pesadas e complexas ligações físicas por sinais elétricos e computadores, redefinindo a forma como as aeronaves são pilotadas.
Imagine pilotar uma aeronave onde cada comando é instantaneamente processado por computadores sofisticados, otimizando cada movimento para máxima performance e segurança. É essa a promessa do Fly-by-Wire. Mas a evolução não parou por aí. Sistemas ainda mais avançados, como o Sistema de Controle de Voo Inteligente (IFCS) desenvolvido pela NASA, estão levando esta revolução a um novo patamar, utilizando inteligência artificial para criar aeronaves que podem aprender e se adaptar a falhas em tempo real.
Neste post, vamos explorar a jornada desde os controles tradicionais até os sistemas adaptativos, compreendendo como funcionam, suas vantagens e o futuro promissor que representam para a segurança e eficiência da aviação.
A Evolução dos Sistemas de Controle: Do Músculo à Mente
Durante grande parte da história da aviação, os controles de voo dependiam de ligações mecânicas diretas. Quando um piloto movia o manche ou os pedais, essa ação era transmitida através de um complexo sistema de cabos, roldanas, hastes e sistemas hidráulicos para mover as superfícies de controle da aeronave (como ailerons e profundores).
Este método, embora eficaz, proporcionava uma sensação de ligação direta com a aeronave, permitindo ao piloto “sentir” a resistência do ar e o comportamento do avião. No entanto, apresentava desvantagens significativas.
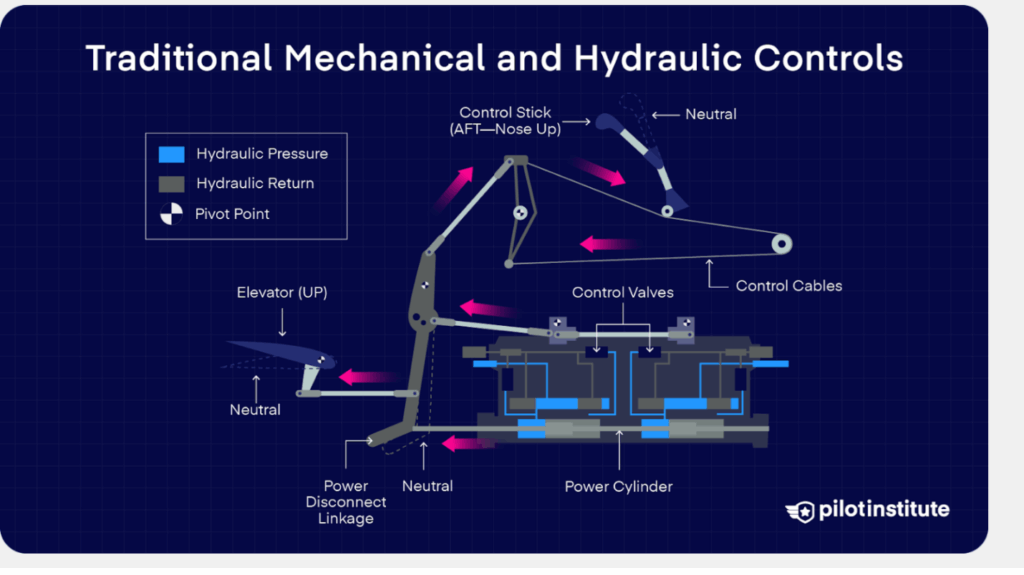
Controle Tradicional Hidromecânico
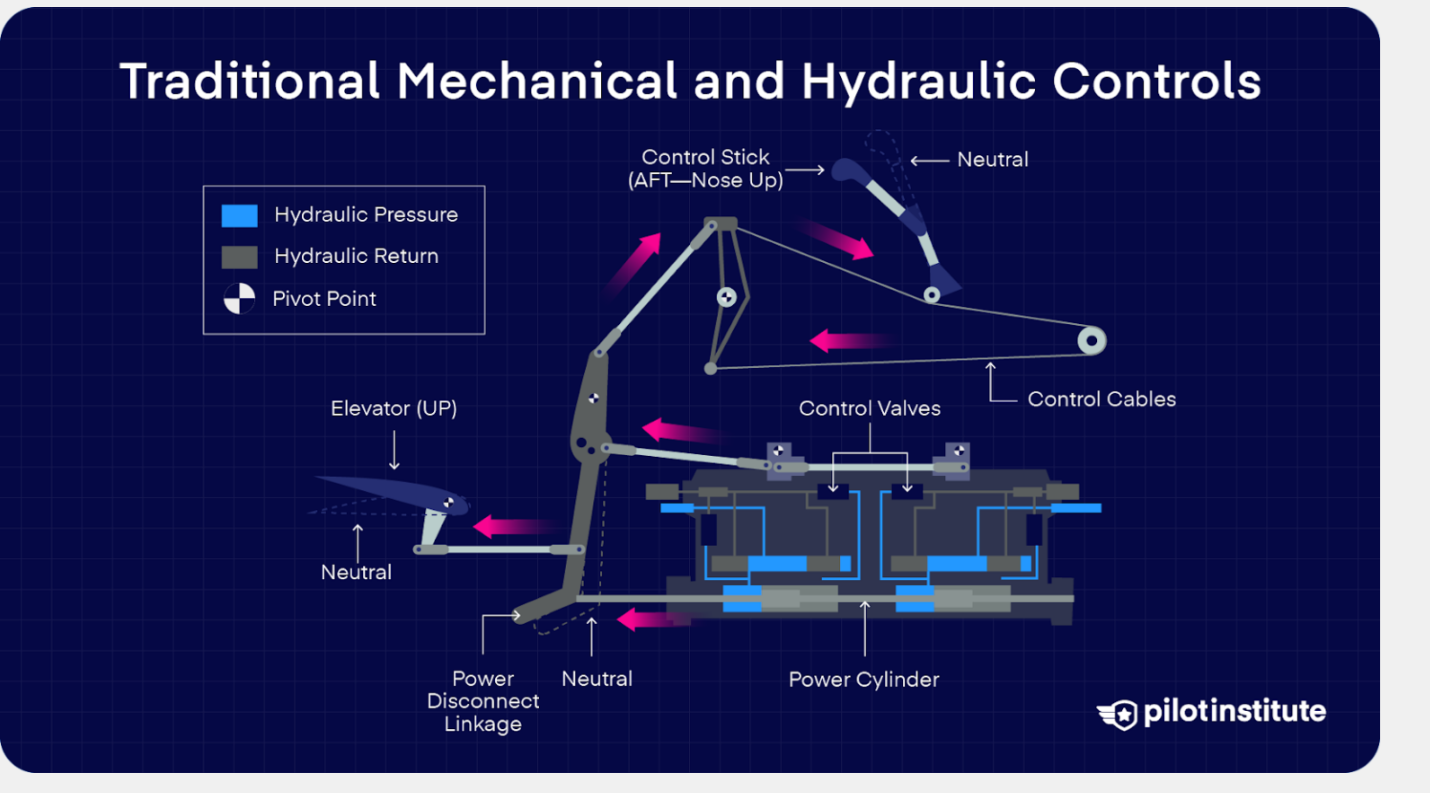
Fonte: Pilot Institute (adaptado pelo autor)
Como se pode observar na ilustração acima, os sistemas tradicionais eram pesados, complexos e exigiam uma manutenção intensiva para garantir que todas as partes móveis funcionassem corretamente. Além disso, à medida que as aeronaves se tornavam maiores e mais rápidas, a força necessária para mover as superfícies de controle aumentava drasticamente, tornando os sistemas puramente mecânicos impraticáveis.
A necessidade de superar estas limitações impulsionou a inovação, culminando na tecnologia Fly-by-Wire.
O Salto para o Digital: A Chegada do Fly-by-Wire
A grande mudança ocorreu com a substituição das ligações mecânicas por sinais elétricos. No sistema FBW, os inputs do piloto são convertidos em sinais digitais, transmitidos por fios até os computadores de controle de voo. Estes computadores, por sua vez, processam os sinais e enviam comandos aos atuadores que movem as superfícies de controle. Essencialmente, a aeronave passou a ter um intermediário inteligente que otimiza as ações do piloto em tempo real.
A transição foi gradual, marcada por vários marcos importantes [1]:
•Anos 30: O Tupolev ANT-20 soviético experimentou com controles servo-operados, um precursor dos sistemas FBW.
•1958: O Avro Canada CF-105 Arrow tornou-se a primeira aeronave não experimental a voar com um sistema FBW analógico.
•1972: A NASA modificou um F-8C Crusader, que se tornou a primeira aeronave a voar com um sistema FBW totalmente digital, utilizando um computador de voo do programa Apollo.
•1988: O Airbus A320 marcou a entrada do FBW digital na aviação comercial, uma abordagem mais tarde adotada pela Boeing com o 777 em 1994.
Como Funciona o Fly-by-Wire: Os Componentes Essenciais
Um sistema Fly-by-Wire simplifica o design dos controles de uma aeronave, tornando-o mais limpo e inteligente. A eletrônica assume o trabalho pesado, resultando em maior precisão. O sistema é composto por três grupos principais de componentes que trabalham em conjunto.
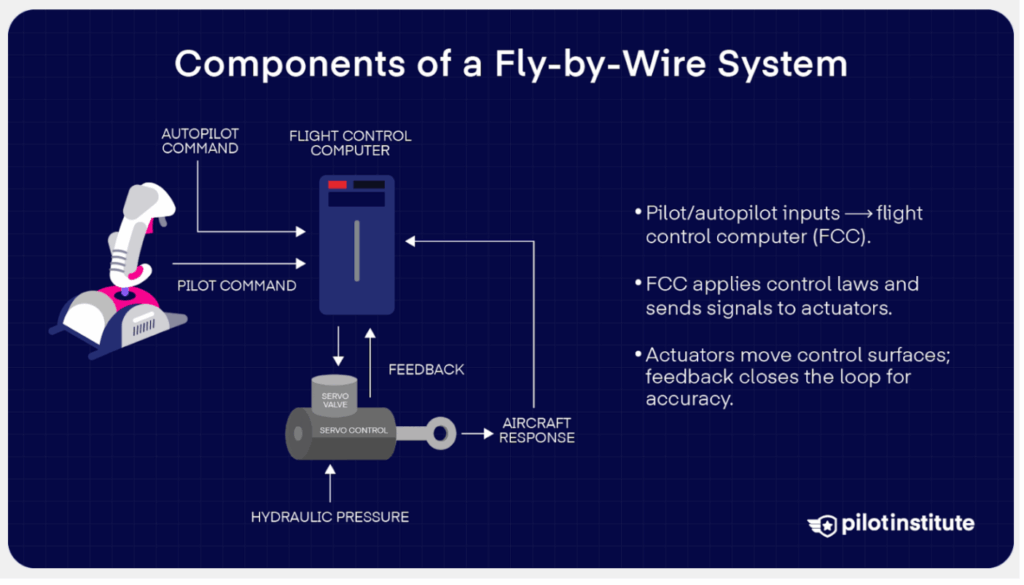
Componentes de um Sistema Fly-by-Wire
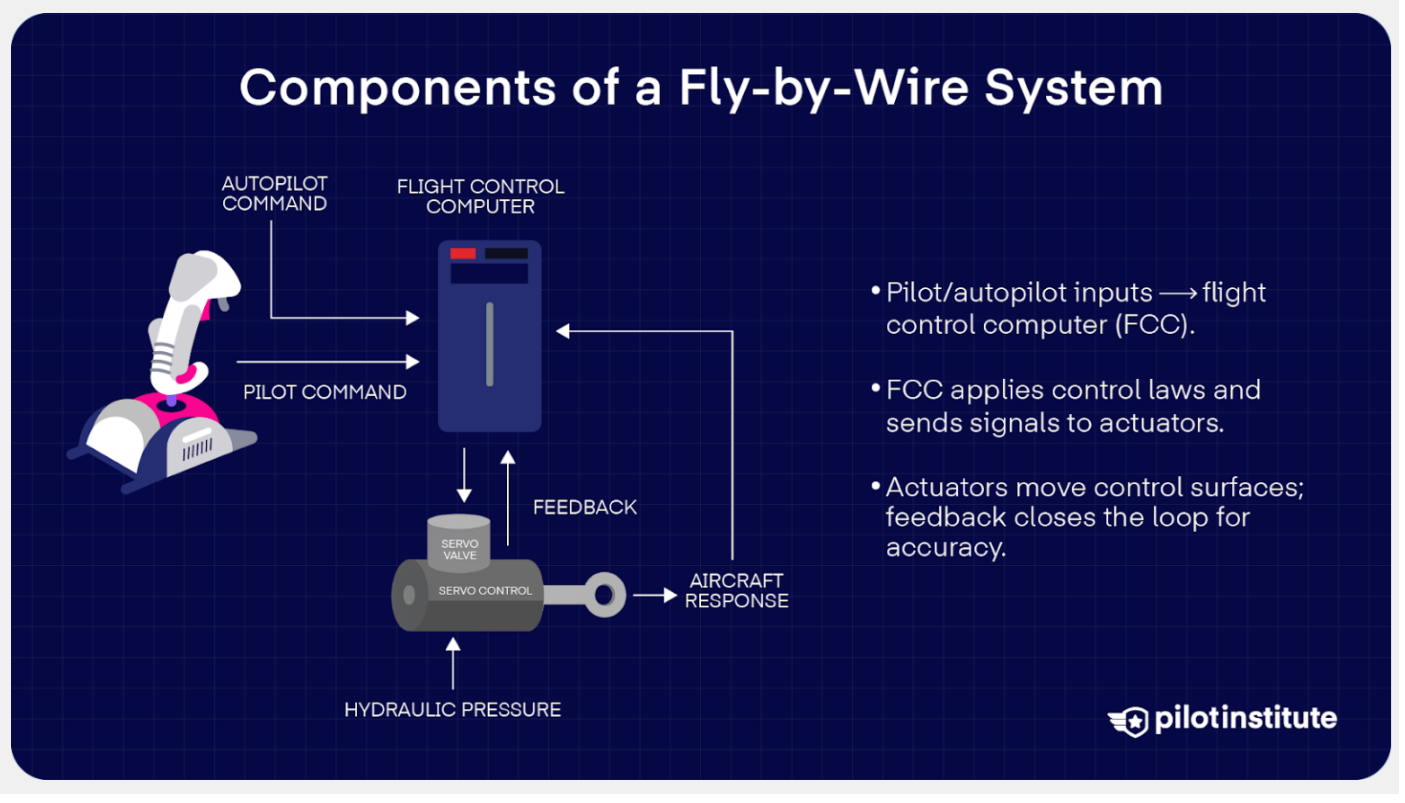
Fonte: Pilot Institute (adaptado pelo autor)
1.Dispositivos de Input do Piloto: Seja um sidestick (como nos Airbus) ou um manche tradicional (como nos Boeing), os comandos do piloto são o ponto de partida. Sensores convertem estes movimentos físicos em sinais elétricos.
2.Computadores de Controle de Voo (FCCs): Considerados o “cérebro” do sistema, os FCCs recebem os sinais do piloto e dados de múltiplos sensores da aeronave (velocidade, altitude, atitude, etc.). Eles então aplicam as chamadas leis de controle (control laws), que são regras que determinam como a aeronave deve responder, garantindo que ela permaneça dentro de um envelope de voo seguro. Estes sistemas possuem uma enorme redundância (tripla ou quádrupla) para garantir a confiabilidade.
3.Atuadores e Superfícies de Controle: Os atuadores são os “músculos” do sistema. Eles recebem os comandos elétricos dos FCCs e os convertem em movimento físico, movendo as superfícies de controle (ailerons, profundores, leme). Um mecanismo de feedback informa constantemente a posição das superfícies de volta aos computadores, criando um ciclo fechado que garante a precisão dos comandos.
Vantagens da Revolução Digital
A adoção do Fly-by-Wire trouxe benefícios que vão muito além da simples substituição de componentes mecânicos. Estas vantagens transformaram a performance, a segurança e a própria concepção das aeronaves.
| Vantagem | Descrição |
| Redução de Peso | A substituição de pesados sistemas mecânicos por cabos elétricos leves resulta em uma aeronave mais leve, o que se traduz em maior eficiência de combustível e capacidade de carga. |
| Performance Melhorada | Os computadores otimizam continuamente os comandos, resultando em um controle mais suave e preciso. Isto permite também que os engenheiros projetem aeronaves aerodinamicamente instáveis (como caças de alta performance), que dependem dos computadores para se manterem estáveis, alcançando uma manobrabilidade impossível com sistemas convencionais. |
| Segurança Aumentada | Os sistemas FBW incluem proteções do envelope de voo, que impedem o piloto de realizar manobras que possam colocar a aeronave em risco (como um stall ou uma velocidade excessiva). A redundância dos sistemas garante que a falha de um componente não resulte na perda de controle. |
| Redução da Carga de Trabalho do Piloto | Funções como o auto-trim (ajuste automático da compensação) e a monitorização constante do envelope de voo liberam o piloto de tarefas repetitivas, permitindo que se concentre na gestão da missão, na tomada de decisões e na consciência situacional. |
O Próximo Passo: O Sistema de Controle de Voo Inteligente (IFCS)
Se o Fly-by-Wire foi uma revolução, o Sistema de Controle de Voo Inteligente (IFCS), desenvolvido pela NASA, representa a sua evolução natural para a era da inteligência artificial. Este sistema vai além da simples execução de comandos otimizados; ele aprende e se adapta em tempo real.
O IFCS baseia-se em redes neurais adaptativas, uma tecnologia que permite ao sistema aprender com a experiência. A sua principal aplicação é na gestão de anomalias e falhas.
Como o IFCS Funciona?
Quando uma aeronave sofre uma falha — seja em uma superfície de controle ou um dano estrutural — o seu comportamento em voo se altera. O IFCS detecta estas alterações através dos sinais de feedback do sistema de controle. A rede neural processa instantaneamente esta informação e calcula os ajustes necessários para compensar a falha, mantendo a aeronave estável e controlável.
A capacidade de aprendizagem significa que o sistema não apenas reage, mas também reconhece padrões de falha. Isto permite-lhe manter o controle em situações que, de outra forma, seriam catastróficas, dando ao piloto a capacidade de realizar uma aterrissagem segura mesmo após danos significativos.
Benefícios do IFCS
•Compensação de Falhas: A sua função primária é manter a controlabilidade da aeronave mesmo com danos severos.
•Melhoria do Desempenho: O sistema otimiza continuamente a resposta dos controles, mesmo em operações normais.
•Aumento da Segurança: Proporciona uma camada adicional de segurança, permitindo a recuperação de situações de voo extremas.
•Redução da Carga de Trabalho do Piloto: Em emergências, o IFCS assume a tarefa complexa de estabilizar a aeronave, permitindo que o piloto se concentre em outras tarefas críticas.
TRADUÇÃO E EXPLICAÇÃO DETALHADA
1. COMPONENTES DE UM SISTEMA TRADICIONAL HIDRO-MECÂNICO
Componentes e Elementos do Sistema
1. CONTROL STICK (AFT—Nose Up) (Manche de Controle)
Tradução: Manche de Controle (Para Trás—Nariz para Cima)
Explicação: O manche de controle (control stick ou yoke) é o dispositivo principal que o piloto utiliza para controlar o movimento de arfagem (pitch) e rolamento (roll) da aeronave. Quando o piloto puxa o manche para trás (aft), a aeronave levanta o nariz (nose up), fazendo-a subir. Quando empurra para frente, o nariz abaixa. Movimentos laterais do manche controlam o rolamento da aeronave. No sistema tradicional, este manche está mecanicamente conectado às superfícies de controle através de cabos de aço e sistemas de roldanas. Isso significa que existe uma ligação física direta entre o movimento do piloto e o movimento das superfícies, proporcionando feedback tátil imediato sobre as forças aerodinâmicas que atuam sobre a aeronave.
2. NEUTRAL (Neutro)
Tradução: Neutro / Posição Neutra
Explicação: A posição neutra representa o estado de repouso do sistema de controle, onde nenhuma força está sendo aplicada e as superfícies de controle estão em sua posição central. No diagrama, vemos várias indicações de “Neutral” que mostram os pontos de equilíbrio do sistema:
•Neutral do Manche: Quando o piloto não está aplicando força, o manche retorna à posição neutra.
•Neutral do profundor: A superfície de controle (profundor) está na posição central, sem deflexão para cima ou para baixo.
•Neutral do Sistema Hidráulico: Os cilindros hidráulicos estão em posição de repouso, sem aplicar força em nenhuma direção.
Esta característica de retorno à posição neutra é fundamental para a estabilidade da aeronave e é conseguida através de molas e sistemas de compensação mecânica.
3. CONTROL CABLES (Cabos de Controle)
Tradução: Cabos de Controle
Explicação: Os cabos de controle são cabos de aço de alta resistência que transmitem mecanicamente os movimentos do manche do piloto até as superfícies de controle. Estes cabos passam por um sistema de roldanas e polias distribuídas ao longo da fuselagem da aeronave. Quando o piloto move o manche, os cabos são puxados ou liberados, transmitindo o movimento através de toda a estrutura da aeronave até chegar às superfícies de controle nas asas e cauda. Este sistema é simples e confiável, mas apresenta desvantagens significativas:
•Peso: Os cabos e todo o sistema de roldanas são pesados.
•Manutenção: Requerem inspeção constante para verificar desgaste, tensão adequada e lubrificação.
•Atrito: O atrito nos cabos e roldanas pode reduzir a precisão do controle.
•Limitação de Força: Em aeronaves grandes e rápidas, a força necessária para mover as superfícies pode ser maior do que o piloto consegue aplicar manualmente.
4. PIVOT POINT (Ponto de Pivô)
Tradução: Ponto de Pivô / Ponto de Articulação
Explicação: Os pontos de pivô são as articulações mecânicas onde as superfícies de controle se conectam à estrutura da aeronave e onde os sistemas de alavancas mudam a direção do movimento. No diagrama, vemos vários pontos de pivô:
•Pivô do profundor: O ponto onde o profundor (elevator) se articula com o estabilizador horizontal, permitindo que ele se mova para cima e para baixo.
•Pivôs das Alavancas: Pontos onde as hastes e alavancas do sistema de controle mudam de direção para transmitir o movimento dos cabos até as superfícies.
Estes pontos de pivô são críticos para o funcionamento do sistema e devem ser mantidos lubrificados e livres de desgaste. Eles também podem introduzir “folga” (play) no sistema de controle ao longo do tempo, reduzindo a precisão.
5. CONTROL VALVES (Válvulas de Controle)
Tradução: Válvulas de Controle
Explicação: As válvulas de controle são componentes hidráulicos que regulam o fluxo de fluido hidráulico para os cilindros de potência (power cylinders). Quando o piloto move o manche, o movimento dos cabos aciona estas válvulas, que então direcionam a pressão hidráulica para um lado ou outro do cilindro de potência. Estas válvulas funcionam como amplificadores mecânicos-hidráulicos:
•Entrada: Movimento mecânico dos cabos de controle (força relativamente pequena do piloto).
•Saída: Direcionamento de alta pressão hidráulica (força muito maior) para mover as superfícies de controle.
As válvulas de controle são essenciais em aeronaves maiores, onde a força aerodinâmica sobre as superfícies de controle é tão grande que seria impossível para o piloto movê-las apenas com força muscular através dos cabos.
6. POWER CYLINDER (Cilindro de Potência)
Tradução: Cilindro de Potência / Atuador Hidráulico
Explicação: O cilindro de potência (também chamado de atuador hidráulico) é o componente que converte a pressão hidráulica em movimento mecânico poderoso. Ele consiste em um cilindro contendo um pistão que pode se mover para frente e para trás. O diagrama mostra o cilindro com duas câmaras:
•Pressão Hidráulica (azul): Quando a válvula de controle direciona fluido pressurizado para um lado do pistão, ele se move.
•Retorno Hidráulico (cinza): O fluido do outro lado do pistão retorna ao reservatório.
O movimento do pistão está mecanicamente conectado à superfície de controle (profundor, aileron, etc.), fornecendo a força necessária para movê-la contra as forças aerodinâmicas. Este sistema permite que um piloto controle uma aeronave grande com relativa facilidade, pois a força hidráulica faz o “trabalho pesado”.
7. POWER DISCONNECT LINKAGE (Ligação de Desconexão de Potência)
Tradução: Ligação de Desconexão de Potência / Sistema de Desacoplamento
Explicação: A ligação de desconexão de potência é um mecanismo de segurança crítico que permite desconectar o sistema hidráulico em caso de falha. Se o sistema hidráulico falhar ou travar em uma posição, este mecanismo permite que o piloto desacople o atuador hidráulico e controle a superfície diretamente através dos cabos mecânicos (embora com muito mais esforço físico). Este é um sistema de backup essencial que garante que a aeronave permaneça controlável mesmo em caso de falha hidráulica completa. O diagrama mostra este componente na posição neutra, indicando que o sistema hidráulico está acoplado e funcionando normalmente.
8. ELEVATOR (UP) (PROFUNDOR- Para Cima)
Tradução: PROFUNDOR (Para Cima)
Explicação: O PROFUSNDOR é a superfície de controle móvel localizada na cauda da aeronave (no estabilizador horizontal) que controla o movimento de arfagem (pitch). Quando o piloto puxa o manche para trás, o profundor se move para cima, criando uma força aerodinâmica que empurra a cauda para baixo e levanta o nariz da aeronave. O diagrama mostra o profundor (elevator) em sua posição neutra e também indica o movimento para cima (up) que ocorre quando comandado. No sistema tradicional, o profundor está conectado aos cabos de controle e ao cilindro de potência hidráulico através de hastes mecânicas e pontos de pivô.
9. HYDRAULIC PRESSURE (Pressão Hidráulica – Azul)
Tradução: Pressão Hidráulica
Explicação: Representada pela cor azul no diagrama, a pressão hidráulica é o fluido pressurizado que fornece a força necessária para mover as superfícies de controle. O sistema hidráulico da aeronave consiste em:
•Bombas hidráulicas: Geralmente acionadas pelos motores da aeronave, que pressurizam o fluido hidráulico.
•Reservatórios: Armazenam o fluido hidráulico.
•Linhas de pressão: Tubulações que distribuem o fluido pressurizado (mostradas em azul).
•Fluido hidráulico: Geralmente um óleo especial que pode suportar altas pressões e temperaturas.
A pressão hidráulica típica em aeronaves varia de 3.000 a 5.000 PSI (libras por polegada quadrada), fornecendo força suficiente para mover rapidamente superfícies de controle grandes contra forças aerodinâmicas intensas.
10. HYDRAULIC RETURN (Retorno Hidráulico – Cinza)
Tradução: Retorno Hidráulico
Explicação: Representado pela cor cinza no diagrama, o retorno hidráulico é o caminho pelo qual o fluido hidráulico retorna ao reservatório após passar pelo cilindro de potência. Quando o pistão se move em uma direção, ele empurra o fluido do outro lado do cilindro de volta através das linhas de retorno. Este é um sistema de circuito fechado onde o fluido circula continuamente:
1.Bomba pressuriza o fluido
2.Válvula de controle direciona para o cilindro
3.Cilindro move a superfície de controle
4.Fluido retorna ao reservatório
5.Ciclo se repete
As linhas de retorno operam em pressão muito mais baixa que as linhas de pressão, pois sua função é apenas transportar o fluido de volta, não fornecer força.
Fluxo de Funcionamento do Sistema Tradicional
O diagrama ilustra o fluxo completo de controle em um sistema mecânico-hidráulico tradicional:
- Input do Piloto: O piloto move o manche de controle para trás (comando de nariz para cima).
2. Transmissão Mecânica: O movimento é transmitido através dos cabos de controle que passam por pontos de pivô e roldanas ao longo da fuselagem.
3. Acionamento da Válvula: Os cabos acionam as válvulas de controle no sistema hidráulico.
4. Amplificação Hidráulica: As válvulas direcionam a pressão hidráulica (azul) para um lado do cilindro de potência, enquanto o retorno hidráulico (cinza) drena o outro lado.
5. Movimento da Superfície: O cilindro de potência move o profundor para cima através de hastes mecânicas e pontos de pivô.
6. Resposta da Aeronave: O profundor levantado cria força aerodinâmica que levanta o nariz da aeronave.
7. Feedback Tátil: O piloto sente a resistência através dos cabos, proporcionando feedback direto sobre as forças aerodinâmicas.
8. Retorno ao Neutro: Quando o piloto libera o manche, molas e compensadores retornam o sistema à posição neutra.
9. Sistema de Segurança: Em caso de falha hidráulica, a ligação de desconexão de potência permite controle manual direto (com muito mais esforço).
Comparação: Sistema Tradicional vs. Fly-by-Wire
| Aspecto | Sistema Tradicional | Sistema Fly-by-Wire |
| Conexão Piloto-Superfície | Mecânica direta (cabos e hastes) | Eletrônica (sinais elétricos) |
| Feedback Tátil | Natural e direto através dos cabos | Artificial (simulado por molas/motores) |
| Peso do Sistema | Pesado (cabos, roldanas, hastes) | Leve (fios elétricos) |
| Manutenção | Intensiva (inspeção de cabos, lubrificação) | Reduzida (menos partes móveis) |
| Proteções Automáticas | Nenhuma (piloto tem controle total) | Extensivas (envelope protection) |
| Amplificação de Força | Hidráulica (cilindros de potência) | Hidráulica ou elétrica (atuadores) |
| Complexidade | Mecânica (muitas partes móveis) | Eletrônica (software e computadores) |
| Confiabilidade | Dependente de manutenção mecânica | Dependente de redundância eletrônica |
| Precisão | Limitada por atrito e folgas | Alta (controle digital preciso) |
| Backup em Falha | Desconexão manual do sistema hidráulico | Múltiplos computadores redundantes |
Vantagens do Sistema Tradicional
Apesar de ter sido amplamente substituído pelo Fly-by-Wire em aeronaves modernas, o sistema tradicional tinha algumas vantagens:
1.Feedback Tátil Natural: O piloto podia “sentir” a aeronave através dos controles, recebendo informações valiosas sobre velocidade, carga aerodinâmica e proximidade de stall.
2.Simplicidade Conceitual: Mais fácil de entender e diagnosticar problemas sem equipamentos eletrônicos sofisticados.
3.Independência de Energia Elétrica: Não depende de computadores ou sistemas elétricos complexos (embora ainda precise de energia hidráulica).
4.Controle Direto: O piloto tem controle total sem interferência de computadores, o que alguns pilotos preferem.
Desvantagens do Sistema Tradicional
As desvantagens que levaram à sua substituição incluem:
1.Peso Excessivo: Cabos, roldanas, hastes e todo o sistema mecânico são muito pesados, especialmente em aeronaves grandes.
2.Manutenção Intensiva: Requer inspeção constante de todos os componentes mecânicos, lubrificação, ajuste de tensão dos cabos, etc.
3.Limitações de Design: A necessidade de estabilidade aerodinâmica natural limita a manobrabilidade da aeronave.
4.Atrito e Folgas: Com o tempo, o sistema desenvolve folgas e atrito que reduzem a precisão do controle.
5.Sem Proteções Automáticas: O piloto pode inadvertidamente comandar manobras perigosas (stall, overspeed, etc.) sem qualquer aviso ou prevenção do sistema.
6.Dificuldade em Aeronaves Grandes: À medida que as aeronaves crescem, a complexidade e o peso do sistema mecânico aumentam exponencialmente.
2. Componentes do Sistema Fly-by-Wire:
PILOT COMMAND (Comando do Piloto)
Tradução: Comando do Piloto
Explicação: Representa os inputs físicos que o piloto realiza através dos dispositivos de controle na cabine. Quando o piloto move o manche (yoke), o sidestick ou os pedais do leme, esses movimentos físicos são o ponto de partida de todo o processo de controle.
Nos sistemas Fly-by-Wire, estes comandos não estão mecanicamente ligados às superfícies de controle; em vez disso, são capturados por sensores ou transdutores que convertem os movimentos em sinais elétricos. Esta é a interface humana do sistema, onde a intenção do piloto é traduzida em dados que o sistema pode processar.
2. AUTOPILOT COMMAND (Comando do Piloto Automático)
Tradução: Comando do Piloto Automático
Explicação: Representa os inputs gerados pelo sistema de piloto automático quando este está ativo. O piloto automático é um sistema que pode assumir o controle da aeronave em determinadas fases do voo (cruzeiro, aproximação, etc.). Quando ativado, o piloto automático envia comandos diretamente ao Flight Control Computer (FCC), da mesma forma que os comandos manuais do piloto.
A diferença é que estes comandos são gerados automaticamente com base em parâmetros pré-programados (altitude, velocidade, rota) e dados dos sensores da aeronave. O diagrama mostra que tanto os comandos do piloto quanto os do piloto automático convergem para o mesmo computador de controle de voo, demonstrando a integração entre o controle manual e automático.
3. FLIGHT CONTROL COMPUTER (FCC) (Computador de Controle de Voo)
Tradução: Computador de Controle de Voo (FCC)
Explicação: Este é o “cérebro” do sistema Fly-by-Wire. O FCC recebe os inputs tanto do piloto quanto do piloto automático e processa-os juntamente com dados provenientes de uma rede de sensores da aeronave (velocidade do ar, altitude, atitude, aceleração, etc.). A função crítica do FCC é aplicar as leis de controle (control laws), que são algoritmos sofisticados que determinam como a aeronave deve responder aos comandos recebidos. Estas leis garantem que a aeronave permaneça dentro do seu envelope de voo seguro, aplicando proteções automáticas contra situações perigosas como stall (perda de sustentação), velocidade excessiva ou ângulos de inclinação extremos. O FCC então envia sinais elétricos precisos aos atuadores. Para garantir a confiabilidade, os sistemas modernos utilizam múltiplos FCCs redundantes (triplos ou quádruplos), de modo que, se um falhar, os outros assumem imediatamente.
4. SERVO CONTROL (Controle Servo)
Tradução: Controle Servo / Servo-Controle
Explicação: O servo-controle é o componente que recebe os sinais elétricos do FCC e os converte em movimento mecânico. Trata-se de um atuador que funciona como intermediário entre o comando eletrônico e o movimento físico das superfícies de controle. No diagrama, o servo-controle é alimentado por pressão hidráulica e contém uma servo valve (válvula servo) que regula o fluxo de fluido hidráulico. Quando o FCC envia um sinal, a válvula servo abre ou fecha, direcionando a pressão hidráulica para mover o atuador na direção e magnitude corretas. Este é o “músculo” do sistema, traduzindo comandos digitais em força física capaz de mover as grandes superfícies de controle da aeronave.
5. SERVO VALVE (Válvula Servo)
Explicação: A válvula servo é um componente crítico dentro do servo-controle. Ela funciona como uma válvula de controle proporcional que regula o fluxo de fluido hidráulico com base nos sinais elétricos recebidos do FCC. Quando o computador determina que uma superfície de controle precisa se mover, a válvula servo se abre na proporção exata necessária, permitindo que a pressão hidráulica acione o atuador. A precisão desta válvula é fundamental para garantir que os movimentos das superfícies de controle sejam suaves, precisos e proporcionais aos comandos do piloto. É através desta válvula que a “inteligência” do sistema digital se traduz em ação mecânica controlada.
6. HYDRAULIC PRESSURE (Pressão Hidráulica)
Tradução: Pressão Hidráulica
Explicação: A pressão hidráulica é a fonte de energia que alimenta os atuadores para mover as superfícies de controle. Nas aeronaves modernas, especialmente as de grande porte, as forças aerodinâmicas que atuam sobre as superfícies de controle são enormes, tornando impossível movê-las apenas com força elétrica ou mecânica direta. Os sistemas hidráulicos utilizam fluido pressurizado (geralmente óleo hidráulico) para gerar a força necessária. Este fluido é bombeado a alta pressão e, quando direcionado pela válvula servo, empurra pistões dentro dos atuadores, criando o movimento poderoso e controlado necessário para mover ailerons, profundores e lemes. A pressão hidráulica é, portanto, a “força bruta” que o sistema utiliza para executar os comandos.
7. FEEDBACK (Retroalimentação / Retorno)
Tradução: Retroalimentação / Retorno / Feedback
Explicação: O feedback é um dos elementos mais importantes do sistema Fly-by-Wire, pois cria um ciclo fechado de controle (closed-loop control). Os atuadores estão equipados com sensores de posição que monitoram constantemente a posição real das superfícies de controle. Estes sensores enviam continuamente informação de volta ao FCC, informando-o sobre a posição exata de cada superfície. O computador compara a posição real com a posição desejada (comandada). Se houver qualquer desvio ou erro, o FCC ajusta imediatamente os sinais enviados aos atuadores para corrigir a diferença. Este mecanismo garante que os movimentos sejam extremamente precisos e que qualquer perturbação (como rajadas de vento) seja compensada automaticamente. Sem o feedback, o sistema seria de “ciclo aberto” e não teria como verificar se os comandos foram executados corretamente.
8. AIRCRAFT RESPONSE (Resposta da Aeronave)
Tradução: Resposta da Aeronave
Explicação: A resposta da aeronave é o resultado final de todo o processo. Quando os atuadores movem as superfícies de controle (ailerons, profundores, leme), a aerodinâmica da aeronave muda, resultando em movimentos como rolamento (roll), arfagem (pitch) ou guinada (yaw). Esta resposta é o comportamento físico da aeronave no ar — a sua reação aos comandos do piloto mediados pelo sistema Fly-by-Wire. A resposta não é apenas o movimento das superfícies, mas sim a mudança na trajetória, atitude e velocidade da aeronave. Esta resposta é constantemente monitorada por sensores (giroscópios, acelerômetros, sensores de velocidade do ar) que alimentam novamente o FCC, fechando o ciclo de controle e permitindo ajustes contínuos para manter o voo suave e seguro.
Resumo do Fluxo de Funcionamento
O diagrama ilustra o fluxo completo de informação e controle em um sistema Fly-by-Wire:
1.Input: O piloto (ou piloto automático) gera comandos através dos dispositivos de controle.
2.Processamento: O Flight Control Computer (FCC) recebe estes comandos e dados dos sensores, aplica as leis de controle e gera sinais elétricos precisos.
3.Atuação: Os sinais são enviados ao servo-controle, onde a válvula servo regula a pressão hidráulica para mover os atuadores.
4.Movimento: Os atuadores movem as superfícies de controle da aeronave.
5.Resposta: A aeronave responde aerodinamicamente aos movimentos das superfícies.
6.Feedback: Sensores monitoram a posição das superfícies e a resposta da aeronave, enviando informação de volta ao FCC.
7.Correção: O FCC compara a resposta real com a desejada e faz ajustes contínuos, criando um ciclo fechado de controle extremamente preciso.
Tabela Resumo dos Componentes
| Componente | Tradução | Função Principal |
| Pilot Command | Comando do Piloto | Input manual do piloto através dos dispositivos de controle (manche, sidestick, pedais) |
| Autopilot Command | Comando do Piloto Automático | Input automático gerado pelo sistema de piloto automático |
| Flight Control Computer (FCC) | Computador de Controle de Voo | “Cérebro” que processa comandos, aplica leis de controle e envia sinais aos atuadores |
| Servo Control | Controle Servo | Atuador que converte sinais elétricos em movimento mecânico usando pressão hidráulica |
| Servo Valve | Válvula Servo | Válvula que regula o fluxo de fluido hidráulico para controlar o movimento do atuador |
| Hydraulic Pressure | Pressão Hidráulica | Fonte de energia que fornece a força necessária para mover as superfícies de controle |
| Feedback | Retroalimentação | Sensores que monitoram a posição das superfícies e enviam informação de volta ao FCC |
| Aircraft Response | Resposta da Aeronave | Comportamento aerodinâmico resultante do movimento das superfícies de controle |
Conceitos-Chave Explicados
Control Laws (Leis de Controle)
As leis de controle mencionadas no diagrama são algoritmos que o FCC utiliza para determinar como a aeronave deve responder aos comandos. Segundo o artigo da Pilot Institute, existem três categorias principais:
•Normal Law: Modo normal com todas as proteções ativas (anti-stall, anti-velocidade excessiva, limites de ângulo de inclinação).
•Alternate Law: Modo degradado quando há falhas em sistemas redundantes; algumas proteções são perdidas.
•Direct Law: Modo direto onde os comandos vão diretamente às superfícies sem proteções automáticas.
Closed-Loop Control (Controle de Ciclo Fechado)
O sistema de feedback cria um ciclo fechado, onde a saída do sistema (posição das superfícies) é constantemente comparada com a entrada desejada (comando do piloto). Qualquer erro é imediatamente corrigido, garantindo precisão máxima. Este é um princípio fundamental da teoria de controle e é o que torna o Fly-by-Wire tão preciso e confiável.
Redundância
Embora não explicitamente mostrado no diagrama, o artigo enfatiza que os sistemas Fly-by-Wire modernos possuem redundância tripla ou quádrupla. Isto significa que existem três ou quatro FCCs independentes, múltiplos sensores e atuadores de backup. Se um componente falha, os outros assumem imediatamente, garantindo que a aeronave permaneça controlável.
GLOSSÁRIO
A
Acelerômetro
Sensor que mede a aceleração da aeronave em diferentes eixos. Fornece dados críticos ao Flight Control Computer sobre as forças G experimentadas pela aeronave, permitindo ajustes precisos no controle de voo.
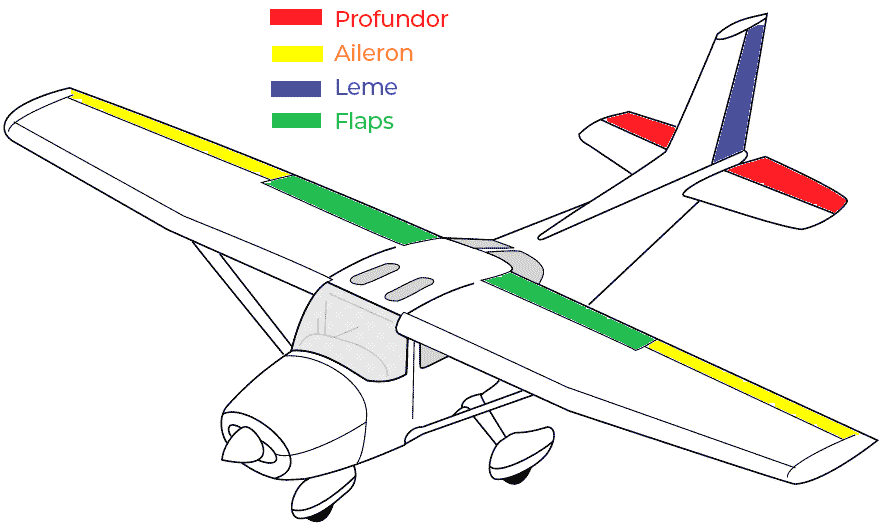
Aileron
Superfície de controle móvel localizada na parte traseira das asas, próxima às pontas. Controla o movimento de rolamento (roll) da aeronave. Quando um aileron sobe, o outro desce, fazendo a aeronave inclinar-se lateralmente.
Alternate Law (Lei Alternativa)
Modo degradado de operação em sistemas Fly-by-Wire que é ativado quando ocorrem falhas múltiplas em sistemas redundantes. Neste modo, algumas proteções automáticas são perdidas e o piloto automático geralmente fica indisponível, aumentando a carga de trabalho do piloto.
Ângulo de Ataque (Angle of Attack – AOA)
Ângulo entre a corda da asa e a direção do fluxo de ar relativo. É um parâmetro crítico para determinar a sustentação e o risco de stall. Sistemas FBW modernos monitoram continuamente o AOA para aplicar proteções anti-stall.
Arfagem (Pitch)
Movimento de rotação da aeronave em torno do seu eixo lateral (asa a asa), fazendo o nariz subir ou descer. Controlado pelo profundor (elevator) ou estabilizador horizontal.
Atuador
Dispositivo mecânico que converte sinais elétricos ou pressão hidráulica em movimento físico. Nos sistemas de controle de voo, os atuadores movem as superfícies de controle (ailerons, profundores, leme) em resposta aos comandos do piloto ou do computador.
Atuador Elétrico
Tipo de atuador que utiliza motores elétricos para mover as superfícies de controle. Mais leve e com menor necessidade de manutenção que os atuadores hidráulicos, sendo cada vez mais comum em aeronaves modernas.
Atuador Eletro-Hidráulico
Atuador híbrido que combina controle elétrico com potência hidráulica, oferecendo a eficiência do controle eletrônico com a força dos sistemas hidráulicos.
Atuador Hidráulico
Atuador que utiliza fluido pressurizado para gerar força mecânica. É o tipo mais comum em aeronaves de grande porte devido à sua capacidade de gerar forças muito elevadas necessárias para mover grandes superfícies de controle.
Auto-Trim (Compensação Automática)
Função automática em sistemas Fly-by-Wire que ajusta continuamente o estabilizador horizontal para manter a aeronave em voo nivelado sem que o piloto precise aplicar força constante nos controles. Reduz significativamente a carga de trabalho do piloto.
B
Backup System (Sistema de Backup)
Sistema redundante que assume o controle em caso de falha do sistema principal. Em aeronaves Fly-by-Wire, múltiplos computadores e sensores redundantes garantem que a falha de um componente não resulte em perda de controle.
Bank Angle (Ângulo de Inclinação)
Ângulo de inclinação lateral da aeronave em relação ao horizonte. Sistemas FBW com Normal Law geralmente limitam o ângulo máximo de inclinação (tipicamente 67° em aviões comerciais) para evitar situações perigosas.
Buffeting
Vibração ou trepidação da aeronave causada por fluxo de ar turbulento, frequentemente sentida quando a aeronave se aproxima do stall. Em sistemas mecânicos tradicionais, o piloto sente o buffeting através dos controles; em sistemas FBW, este feedback tátil é simulado artificialmente.
C
Cabos de Controle
Cabos de aço de alta resistência usados em sistemas de controle tradicionais para transmitir mecanicamente os movimentos do piloto às superfícies de controle através de um sistema de roldanas e polias.
Carga de Trabalho do Piloto
Quantidade de tarefas e atenção mental requerida do piloto durante o voo. Sistemas Fly-by-Wire e IFCS reduzem significativamente a carga de trabalho ao automatizar tarefas repetitivas e fornecer proteções automáticas.
Ciclo Aberto (Open-Loop)
Sistema de controle sem feedback, onde os comandos são executados sem verificação se o resultado desejado foi alcançado. Sistemas de ciclo aberto são menos precisos e não podem compensar perturbações externas.
Ciclo Fechado (Closed-Loop)
Sistema de controle com feedback contínuo, onde a saída é constantemente monitorada e comparada com a entrada desejada. Qualquer erro é automaticamente corrigido. Sistemas Fly-by-Wire utilizam controle de ciclo fechado para máxima precisão.
Cilindro de Potência (Power Cylinder)
Componente hidráulico que converte pressão hidráulica em movimento mecânico linear. Consiste em um cilindro contendo um pistão que se move quando o fluido pressurizado é direcionado para um de seus lados.
Computador de Controle de Voo (Flight Control Computer – FCC)
O “cérebro” do sistema Fly-by-Wire. Processa os comandos do piloto juntamente com dados de sensores, aplica leis de controle e envia sinais precisos aos atuadores. Sistemas modernos utilizam múltiplos FCCs redundantes.
Consciência Situacional (Situational Awareness)
Compreensão do piloto sobre o estado atual da aeronave, sua posição, condições ambientais e possíveis ameaças. Sistemas FBW melhoram a consciência situacional ao reduzir a carga de trabalho e fornecer informações claras sobre o estado do sistema.
Control Laws (Leis de Controle)
Algoritmos sofisticados implementados nos Flight Control Computers que determinam como a aeronave deve responder aos comandos do piloto. Garantem que a aeronave permaneça dentro de seu envelope de voo seguro e aplicam proteções automáticas.
D
Dano Estrutural
Dano físico à estrutura da aeronave que pode afetar suas características de voo. O IFCS é especialmente projetado para detectar e compensar danos estruturais, mantendo a aeronave controlável.
Direct Law (Lei Direta)
Modo de operação em sistemas Fly-by-Wire onde todas as proteções automáticas são desativadas e os comandos do piloto vão diretamente às superfícies de controle, sem intermediação do computador. A sensibilidade do controle depende da velocidade do ar.
Dispositivos de Input
Interfaces físicas através das quais o piloto comanda a aeronave, incluindo manche (yoke), sidestick, pedais do leme e controles de compensação (trim).
E
Eficiência de Combustível
Medida de quão eficientemente uma aeronave utiliza combustível. Sistemas Fly-by-Wire melhoram a eficiência ao reduzir peso e otimizar continuamente o controle das superfícies para minimizar arrasto.
Profundor (Elevator)
Superfície de controle móvel localizada no estabilizador horizontal na cauda da aeronave. Controla o movimento de arfagem (pitch), fazendo o nariz subir ou descer.
Envelope de Voo (Flight Envelope)
Conjunto de limites operacionais seguros de uma aeronave, definidos por parâmetros como velocidade mínima e máxima, ângulo de ataque máximo, fator de carga máximo e ângulo de inclinação máximo.
Envelope Protection (Proteção de Envelope)
Conjunto de proteções automáticas em sistemas Fly-by-Wire que impedem o piloto de comandar manobras que ultrapassem os limites seguros do envelope de voo, prevenindo stall, velocidade excessiva e fatores de carga perigosos.
Estabilidade Aerodinâmica
Tendência natural de uma aeronave retornar ao equilíbrio após uma perturbação. Aeronaves tradicionais precisam de estabilidade natural; aeronaves FBW podem ser projetadas com “estabilidade relaxada” (aerodinamicamente instáveis), dependendo dos computadores para estabilização.
Estabilizador Horizontal
Superfície horizontal na cauda da aeronave que proporciona estabilidade longitudinal e controle de arfagem. Pode ser fixo (com profundor móvel) ou totalmente móvel (estabilizador).
F
Falha de Superfície de Controle
Situação onde uma superfície de controle (aileron, profundor, leme) não responde corretamente aos comandos devido a dano ou mau funcionamento. O IFCS é projetado para detectar e compensar tais falhas.
Fator de Carga (Load Factor)
Razão entre a força total de sustentação e o peso da aeronave, expressa em “G”. Um fator de carga de 1G significa voo nivelado; 2G significa que a aeronave está experimentando o dobro de seu peso. Sistemas FBW limitam o fator de carga máximo para proteger a estrutura.
FBW (Fly-by-Wire)
Sistema de controle de voo que substitui ligações mecânicas tradicionais por sinais elétricos processados por computadores. Os comandos do piloto são convertidos em sinais digitais, processados e enviados aos atuadores.
FCC (Flight Control Computer)
Ver “Computador de Controle de Voo”.
Feedback (Retroalimentação)
Informação sobre o estado atual do sistema que é enviada de volta ao controlador. Em sistemas FBW, sensores monitoram continuamente a posição das superfícies de controle e enviam esta informação ao FCC para garantir precisão.
Feedback Tátil
Sensação física que o piloto recebe através dos controles, informando sobre as forças aerodinâmicas que atuam sobre a aeronave. Em sistemas mecânicos é natural; em sistemas FBW é artificialmente simulado.
Fluido Hidráulico
Óleo especial usado em sistemas hidráulicos para transmitir pressão e força. Deve suportar altas pressões (3.000-5.000 PSI) e ampla faixa de temperaturas sem degradação.
Força Aerodinâmica
Força exercida pelo ar em movimento sobre as superfícies da aeronave. Inclui sustentação, arrasto e forças laterais que determinam o comportamento de voo.
Force Feedback (Retroalimentação de Força)
Sistema que simula artificialmente a resistência dos controles em aeronaves Fly-by-Wire, proporcionando ao piloto uma sensação similar à dos controles mecânicos tradicionais.
G
Giroscópio
Sensor que mede a taxa de rotação da aeronave em torno de seus três eixos. Fornece dados essenciais ao FCC sobre a atitude e movimentos da aeronave.
Guinada (Yaw)
Movimento de rotação da aeronave em torno de seu eixo vertical, fazendo o nariz girar para a esquerda ou direita. Controlado pelo leme (rudder).
H
Hastes de Controle
Barras rígidas usadas em sistemas mecânicos tradicionais para transmitir movimento entre componentes do sistema de controle, especialmente em áreas onde cabos não são práticos.
I
IFCS (Intelligent Flight Control System)
Sistema de Controle de Voo Inteligente desenvolvido pela NASA, baseado em redes neurais adaptativas. Capaz de aprender e se adaptar a falhas e danos em tempo real, mantendo a aeronave controlável em situações que normalmente seriam catastróficas.
Input do Piloto
Comando ou ação realizada pelo piloto através dos dispositivos de controle (manche, pedais, etc.) para comandar a aeronave.
Inteligência Artificial (IA)
Tecnologia que permite a sistemas computacionais aprenderem, adaptarem-se e tomarem decisões. O IFCS utiliza IA na forma de redes neurais adaptativas para compensar falhas e danos.
L
Lei de Controle
Ver “Control Laws”.
Leme (Rudder)
Superfície de controle móvel localizada no estabilizador vertical na cauda da aeronave. Controla o movimento de guinada (yaw), fazendo o nariz girar para os lados.
Ligação de Desconexão de Potência (Power Disconnect Linkage)
Mecanismo de segurança em sistemas hidráulicos tradicionais que permite desacoplar o atuador hidráulico em caso de falha, permitindo controle manual direto (embora com muito mais esforço).
Linha de Pressão
Tubulação que transporta fluido hidráulico pressurizado do reservatório/bomba até os atuadores. Opera em alta pressão (3.000-5.000 PSI).
Linha de Retorno
Tubulação que transporta fluido hidráulico de volta ao reservatório após passar pelos atuadores. Opera em pressão muito mais baixa que as linhas de pressão.
Load Factor Limitation (Limitação de Fator de Carga)
Proteção automática em sistemas FBW que impede que a aeronave experimente fatores de carga excessivos que poderiam danificar a estrutura ou causar desconforto/lesões aos ocupantes.
M
Manche (Yoke)
Dispositivo de controle tradicional em formato de volante ou “U” usado para controlar arfagem e rolamento. Comum em aeronaves Boeing e aviões menores.
Manobrabilidade
Capacidade da aeronave de realizar manobras e mudanças de direção. Sistemas FBW permitem maior manobrabilidade ao possibilitar designs com estabilidade relaxada.
Manutenção
Conjunto de atividades para manter a aeronave em condições operacionais seguras. Sistemas FBW geralmente requerem menos manutenção que sistemas mecânicos tradicionais devido a menos partes móveis.
N
NASA (National Aeronautics and Space Administration)
Agência espacial dos Estados Unidos responsável pelo desenvolvimento do IFCS e de muitas outras tecnologias aeronáuticas e espaciais.
Neutro (Neutral)
Posição de repouso ou equilíbrio de um sistema de controle, onde nenhuma força está sendo aplicada e as superfícies de controle estão em posição central.
Normal Law (Lei Normal)
Modo de operação padrão em sistemas Fly-by-Wire quando todos os sistemas estão funcionando corretamente. Fornece proteções completas contra stall, velocidade excessiva, ângulos de inclinação extremos e fatores de carga excessivos.
O
Otimização
Processo de ajustar continuamente os parâmetros de controle para alcançar o melhor desempenho possível. Sistemas FBW otimizam constantemente os movimentos das superfícies de controle para minimizar arrasto e maximizar eficiência.
Overspeed (Velocidade Excessiva)
Condição onde a aeronave excede sua velocidade máxima operacional segura, podendo causar danos estruturais. Sistemas FBW com Normal Law impedem automaticamente esta condição.
P
Pedais do Leme
Pedais operados pelos pés do piloto que controlam o leme e, consequentemente, o movimento de guinada da aeronave.
Piloto Automático (Autopilot)
Sistema que pode assumir o controle da aeronave e mantê-la em um curso, altitude e velocidade pré-determinados sem intervenção manual contínua do piloto.
Pistão
Componente móvel dentro de um cilindro hidráulico que converte pressão de fluido em movimento linear.
Pitch
Ver “Arfagem”.
Ponto de Pivô (Pivot Point)
Articulação mecânica onde componentes se conectam e podem girar, permitindo mudança de direção do movimento ou rotação de superfícies de controle.
Power-by-Wire
Tecnologia emergente onde a distribuição de energia na aeronave é gerenciada eletronicamente, similar ao conceito de Fly-by-Wire para controles de voo.
Pressão Hidráulica
Força por unidade de área exercida por fluido hidráulico pressurizado. Em aeronaves, tipicamente varia de 3.000 a 5.000 PSI (libras por polegada quadrada).
Profundor
Ver “profundor”.
Proteção Anti-Stall
Sistema automático que impede que a aeronave entre em stall (perda de sustentação), monitorando continuamente o ângulo de ataque e limitando os comandos do piloto quando necessário.
R
Rajada de Vento (Wind Gust)
Mudança súbita e temporária na velocidade ou direção do vento. Sistemas FBW com feedback compensam automaticamente rajadas de vento para manter o voo estável.
Rede Neural Adaptativa
Tipo de inteligência artificial inspirada no funcionamento do cérebro humano, capaz de aprender com experiências e adaptar seu comportamento. Base tecnológica do IFCS.
Redundância
Duplicação ou triplicação de componentes críticos para garantir que a falha de um não resulte em perda total de funcionalidade. Sistemas FBW modernos têm redundância tripla ou quádrupla.
Redundância Quádrupla (Quad-Redundant)
Sistema com quatro componentes independentes realizando a mesma função. Mesmo que três falhem, o quarto mantém o sistema operacional.
Redundância Tripla (Triple-Redundant)
Sistema com três componentes independentes realizando a mesma função. Mesmo que dois falhem, o terceiro mantém o sistema operacional.
Relaxed Static Stability (Estabilidade Estática Relaxada)
Design de aeronave que é aerodinamicamente instável ou neutra, dependendo de computadores para manter a estabilidade. Permite maior manobrabilidade, especialmente em aeronaves militares.
Resposta da Aeronave (Aircraft Response)
Comportamento físico da aeronave (mudanças em atitude, velocidade, trajetória) resultante dos comandos de controle aplicados.
Retorno Hidráulico (Hydraulic Return)
Caminho pelo qual o fluido hidráulico retorna ao reservatório após passar pelos atuadores. Opera em baixa pressão.
Roll
Ver “Rolamento”.
Rolamento (Roll)
Movimento de rotação da aeronave em torno de seu eixo longitudinal (nariz a cauda), fazendo as asas inclinarem para os lados. Controlado pelos ailerons.
Roldana (Pulley)
Componente em forma de roda com canal periférico usado em sistemas mecânicos tradicionais para guiar e mudar a direção dos cabos de controle.
S
Sensor
Dispositivo que detecta e mede uma propriedade física (posição, velocidade, aceleração, pressão, temperatura, etc.) e converte em sinal elétrico que pode ser processado por computadores.
Sensor de Posição
Sensor que monitora a posição exata de uma superfície de controle ou componente móvel, fornecendo feedback ao FCC para garantir precisão no controle de ciclo fechado.
Servo-Controle (Servo Control)
Atuador que recebe sinais elétricos do FCC e os converte em movimento mecânico usando pressão hidráulica. Funciona como intermediário entre comando eletrônico e movimento físico.
Sidestick
Dispositivo de controle lateral (geralmente à direita ou esquerda do piloto) usado para controlar arfagem e rolamento. Comum em aeronaves Airbus e caças militares modernos.
Sinal Elétrico
Corrente ou voltagem que transporta informação através de fios. Em sistemas FBW, os comandos do piloto e dados de sensores são transmitidos como sinais elétricos.
Sistema de Controle de Voo
Conjunto completo de componentes (mecânicos, hidráulicos, elétricos ou eletrônicos) que permite ao piloto controlar a atitude e trajetória da aeronave.
Sistema Hidráulico
Sistema que utiliza fluido pressurizado para transmitir força e realizar trabalho mecânico. Essencial em aeronaves para mover superfícies de controle, trem de pouso, freios, etc.
Stall (Perda de Sustentação)
Condição aerodinâmica onde o ângulo de ataque se torna tão grande que o fluxo de ar sobre a asa se separa, causando perda súbita de sustentação. Sistemas FBW com Normal Law impedem automaticamente esta condição.
Superfície de Controle
Superfície móvel da aeronave (aileron, profundor, leme, flap, etc.) que, quando defletida, altera as forças aerodinâmicas e controla o movimento da aeronave.
T
Transdutor
Dispositivo que converte um tipo de energia ou sinal em outro. Em sistemas FBW, transdutores convertem movimentos físicos dos controles em sinais elétricos.
Trim (Compensação)
Ajuste fino dos controles para manter a aeronave em uma atitude desejada sem que o piloto precise aplicar força constante. Em sistemas FBW, frequentemente automatizado (auto-trim).
V
Válvula de Controle (Control Valve)
Válvula hidráulica que regula o fluxo de fluido pressurizado para os atuadores com base nos comandos recebidos (mecânicos em sistemas tradicionais, elétricos em sistemas FBW).
Válvula Servo (Servo Valve)
Válvula de controle proporcional que regula com precisão o fluxo de fluido hidráulico com base em sinais elétricos do FCC. Fundamental para a precisão dos sistemas FBW.
Velocidade do Ar (Airspeed)
Velocidade da aeronave em relação ao ar circundante. Parâmetro crítico monitorado continuamente pelos FCCs para aplicar leis de controle apropriadas.
Y
Yaw
Ver “Guinada”.
Yoke
Ver “Manche”.
Siglas e Abreviaturas
| Sigla | Significado | Descrição |
| AOA | Angle of Attack | Ângulo de ataque |
| FBW | Fly-by-Wire | Sistema de controle por sinais elétricos |
| FCC | Flight Control Computer | Computador de controle de voo |
| IFCS | Intelligent Flight Control System | Sistema de controle de voo inteligente |
| NASA | National Aeronautics and Space Administration | Agência espacial dos EUA |
| PSI | Pounds per Square Inch | Libras por polegada quadrada (unidade de pressão) |
| G | Gravity | Unidade de aceleração (força gravitacional) |
| IA | Inteligência Artificial | Tecnologia de aprendizado de máquina |
Aeronaves Históricas Mencionadas
Tupolev ANT-20
Aeronave soviética dos anos 1930 que experimentou com controles servo-operados, precursora dos sistemas FBW.
Avro Canada CF-105 Arrow (1958)
Primeira aeronave não experimental a voar com sistema FBW analógico.
NASA F-8C Crusader (1972)
Primeira aeronave a voar com sistema FBW totalmente digital, usando computador do programa Apollo.
Airbus A320 (1988)
Primeiro avião comercial com sistema FBW totalmente digital, revolucionando a aviação comercial.
Boeing 777 (1994)
Primeiro avião da Boeing com sistema FBW completo, adotando a tecnologia após o sucesso da Airbus.
F-16 Fighting Falcon
Primeiro caça de produção com sistema FBW, demonstrando as vantagens da tecnologia em aeronaves militares de alta performance.
Concorde
Avião supersônico que utilizou sistema FBW analógico, pioneiro na aviação comercial.
Conceitos Fundamentais
Diferença entre Sistema Tradicional e Fly-by-Wire
Sistema Tradicional:
•Ligação mecânica direta (cabos, hastes, roldanas)
•Feedback tátil natural
•Pesado e complexo mecanicamente
•Sem proteções automáticas
•Manutenção intensiva
Sistema Fly-by-Wire:
•Ligação eletrônica (sinais elétricos)
•Feedback tátil artificial
•Leve e simples mecanicamente
•Proteções automáticas extensivas
•Manutenção reduzida
Evolução Tecnológica
1.Controles Mecânicos Puros → Força muscular direta
2.Controles Hidráulicos → Amplificação de força
3.Fly-by-Wire Analógico → Sinais elétricos analógicos
4.Fly-by-Wire Digital → Processamento computacional
5.IFCS (Inteligente) → Inteligência artificial adaptativa
6.Futuro: Fly-by-Light → Sinais ópticos em vez de elétricos
Fontes:
•Pilot Institute – Fly-by-Wire Explained: A Pilot’s Guide to Digital Flight Control
•NASA Dryden Flight Research Center – IFCS Documentation
•Documentos técnicos sobre sistemas de controle de voo
Referências
[1] Pilot Institute. (2025). Fly-by-Wire Explained: A Pilot’s Guide to Digital Flight Control. https://pilotinstitute.com/fly-by-wire/