Como um helicóptero voa?
Uma das diferenças entre um helicóptero e uma aeronave com asas fixas é a fonte de sustentação principal, enquanto a aeronave de asas fixas obtém sua sustentação a partir da superfície de um aerofólio fixo o helicóptero obtém a sua sustentação a partir de um aerofólio rotativo chamado rotor.
Veja aqui tipos e configurações de aeronaves de asa rotativa e como elas voam.
[ninja-inline id=715]
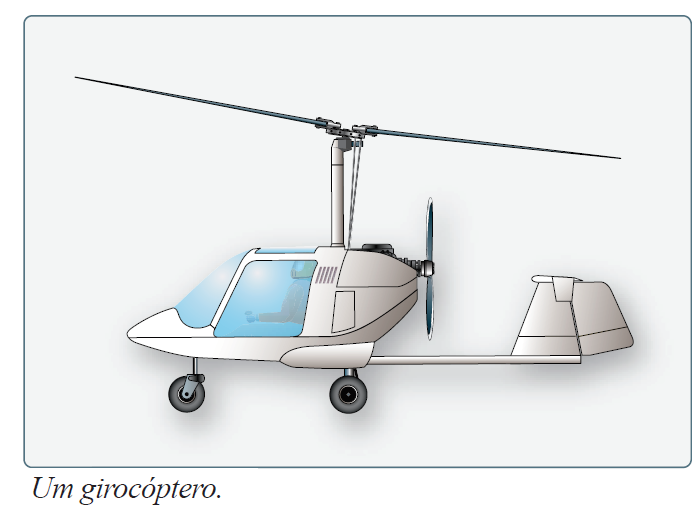
Autogiro ou Girocóptero
Um girocóptero é uma aeronave com um rotor horizontal free-spinnig que gira devido a passagem de ar de cima para baixo através do rotor. Este movimento do ar é gerado a partir do movimento da aeronave para frente a partir de um propulsor/motor de tração ou impulso.
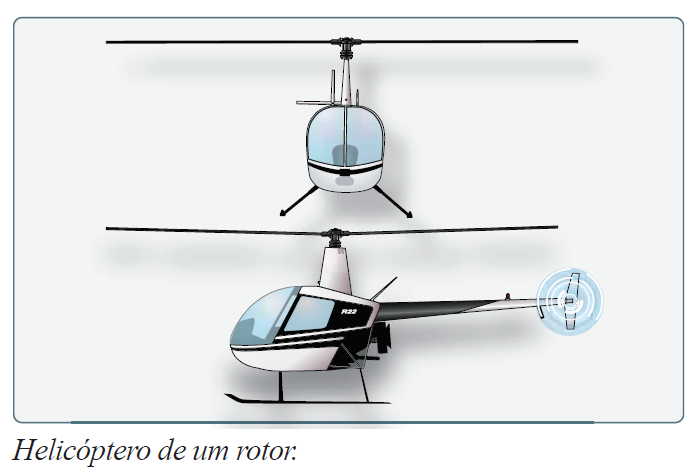
Helicóptero de Um Rotor
Uma aeronave com um único rotor principal horizontal que serve tanto para a sustentação quanto para o direcionamento é um helicóptero de um rotor.
Um segundo rotor montado verticalmente na cauda contra-ataca a força rotativa (torque) do rotor principal para corrigir a guinada da fuselagem.
Helicóptero de Dois Rotores
Uma aeronave com dois rotores horizontais que servem tanto para a sustentação quanto para o direcionamento é um helicóptero de dois rotores. Os rotores giram um na direção contrária do outro para equilibrar o torque aerodinâmico e eliminar a necessidade de um sistema de antitorque.
Fotos de helicópteros e sistemas aqui!

Tipos de Sistema Rotor
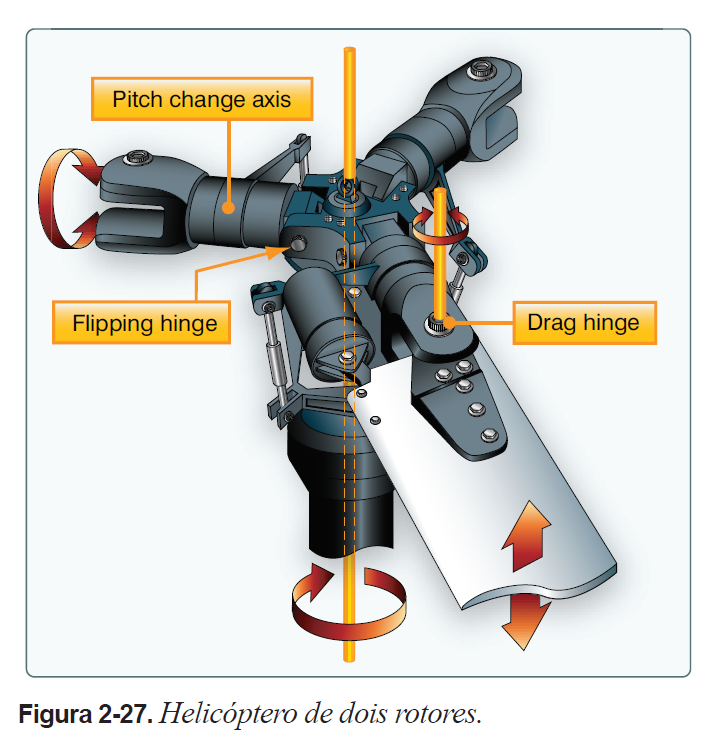
Rotor Totalmente Articulado
Um rotor totalmente articulado pode ser encontrado em aeronaves com mais de duas pás que permita a movimentação de cada pá individual em três direções.
Neste desenho cada pá pode girar sobre o eixo lateral para alterar a sustentação. Cada pá pode se mover para trás e para frente em um plano, lead and lag, e flap up and down through a hinge independent of the other blades.
Rotor Semirrígido
O tipo de rotor semirrígido é encontrado em aeronaves com rotor de duas pás. As pás são conectadas de modo com que uma fique flap up e a outra fique flap down.
Rotor Rígido
O rotor rígido é um sistema raro, porém oferece potencialmente as melhores propriedades em comparação com os rotores totalmente articulado e semirrígido.
Neste desenho, as bases das pás são fixadas de maneira rígida no hub do rotor. As pás não possuem dobradiças/articulações que permitem o lead-lag e flapping.
Ao invés disso as pás absorvem estes movimentos com o uso de elastomeric bearings. Elastomeric bearings são materiais parecidos com borracha que podem ser moldados e que são fundidos a peças devidas.
Ao invés de girar como conventional bearings, eles giram e flexionam para propiciar o movimento das pás.
Forças que Atuam no Helicóptero
Uma das diferenças entre um helicóptero e uma aeronave com asas fixas é a fonte de sustentação principal.
A aeronave de asas fixas obtém sua sustentação a partir da superfície de um aerofólio fixo enquanto que o helicóptero obtém a sua sustentação a partir de um aerofólio rotativo chamado rotor.
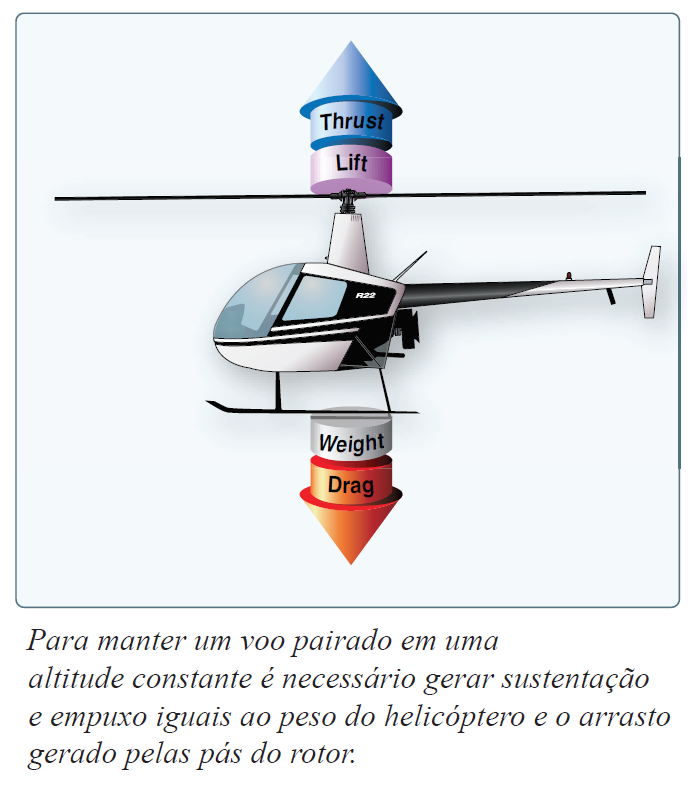
Durante a flutuação em uma condição sem vento, o tip-path plane é horizontal, o que quer dizer que está paralelo ao solo. O levante e o empuxo atuam reto para cima, o peso e o arrasto atuam reto para baixo.
A soma das forças de sustentação e empuxo deve ser igual a soma das forças de peso e arrasto para fazer o helicóptero pairar.
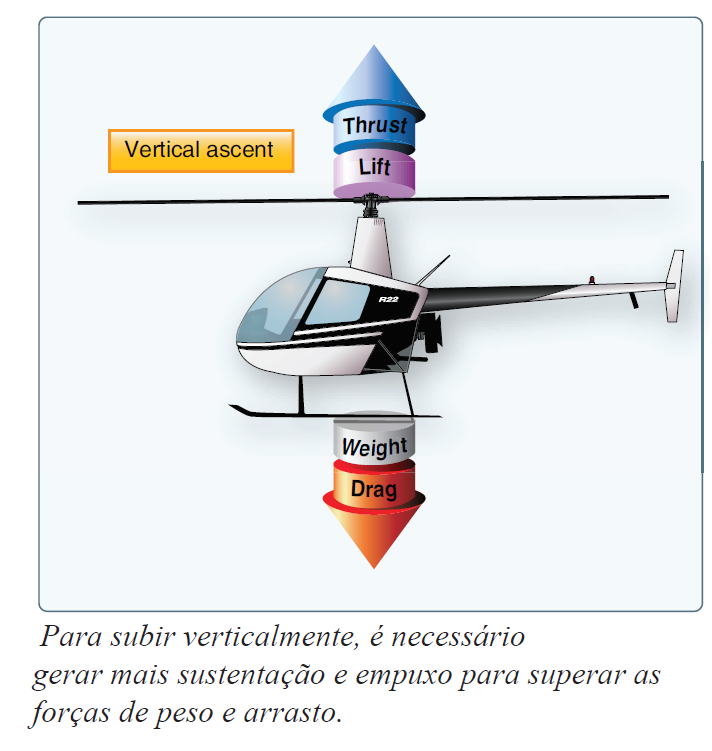
Durante o voo vertical em uma condição sem vento as forças de sustentação e empuxo atuam verticalmente para cima. O peso e o arrasto atuam verticalmente para baixo.
Quando a sustentação e o empuxo são iguais ao peso e o arrasto o helicóptero tende a descer verticalmente. Se a sustentação e o empuxo são maiores do que o peso e o arraso o helicóptero sobe verticalmente.
Para voar para frente, o tip-path plane é inclinado para frente, inclinando, desta forma, a força total de sustentação e empuxo vertical para frente. O resultado desta força de sustentação e empuxo pode ser dividido em dois componentes: sustentação atuando verticalmente para cima e o empuxo atuando horizontalmente na direção do voo.
Além da sustentação e do empuxo há também o peso, a força que atua para baixo, e o arrasto, a força que atua para trás ou da inércia, e a resistência do vento.
Em um voo em linha reta e nivelado, sem aceleração, a sustentação é igual ao peso e o empuxo é igual ao arrasto. (O voo em linha reta e nivelado é o voo com uma direção e altitude constante).
Se a sustentação excede o peso o helicóptero sobe, e se a sustentação é menor do que o peso o helicóptero desce. Se o empuxo excede o arrasto, a velocidade do helicóptero aumenta, e se o empuxo é menor do que o arrasto a velocidade diminui.
No voo lateral, o tip-path plane é inclinado para o lado na direção desejada para o voo, fazendo com que o vetor total de sustentação e empuxo seja inclinado para o lado.
Neste caso o componente vertical ou de sustentação continua reto para cima e o peso reto para baixo, mas o componente horizontal ou de empuxo agora atua para o lado com o arrasto atuando na direção contrária.
Para um voo reverso, o tip-path plane é inclinado para trás, inclinando o vetor de sustentação e empuxo para trás. O empuxo fica então invertido e o componente de arrasto fica para frente, oposto do que ocorre em um voo para frente. O componente de sustentação no voo reverso é reto para cima, e o peso reto para baixo.
Compensação de Torque
A terceira lei de Newton diz que “para cada ação há uma reação oposta igual”. Como o rotor principal de um helicóptero gira em uma direção, a fuselagem tende a girar na direção contrária.
Esta tendência de rotação da fuselagem é chamada de torque. Uma vez que o efeito do torque na fuselagem é o resultado direto da potência do motor que é mandada direto para o rotor, qualquer alteração na potência do motor gera uma alteração correspondente no efeito do torque.
Quanto maior a potência do motor, maior é o efeito do torque. Como não há potência do motor sendo enviada para o rotor principal durante a auto rotação, não há reação de torque nesta condição.
A força que compensa o torque e oferece controle direcional pode ser gerada através de diversos meios. O fator que define isso é determinado pelo desenho do helicóptero, sendo que alguns nem possuem essa questão do torque.
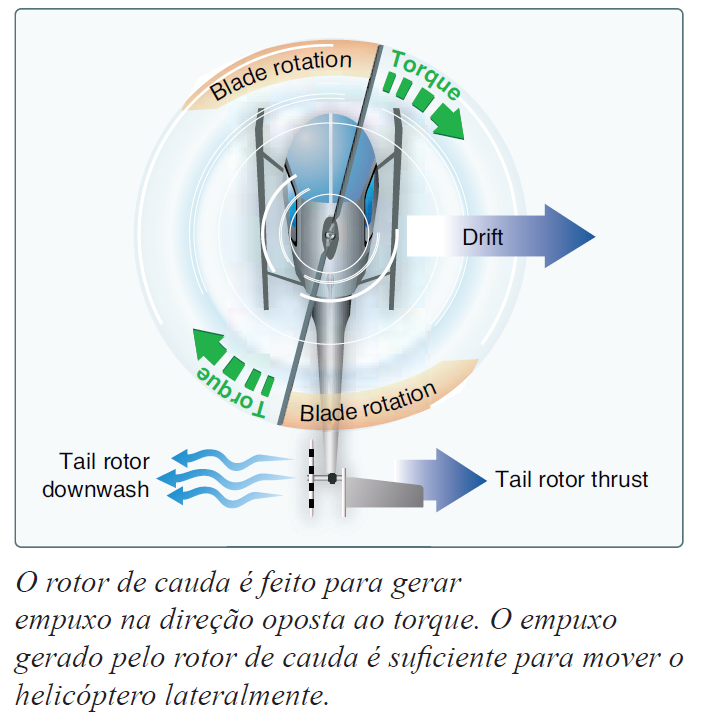
Os projetos de rotor único normalmente possuem um rotor auxiliar localizado na parte final da cauda. Este rotor auxiliar é geralmente chamado de rotor de cauda, e ele gera empuxo na direção oposta a reação do torque desenvolvido pelo rotor principal.
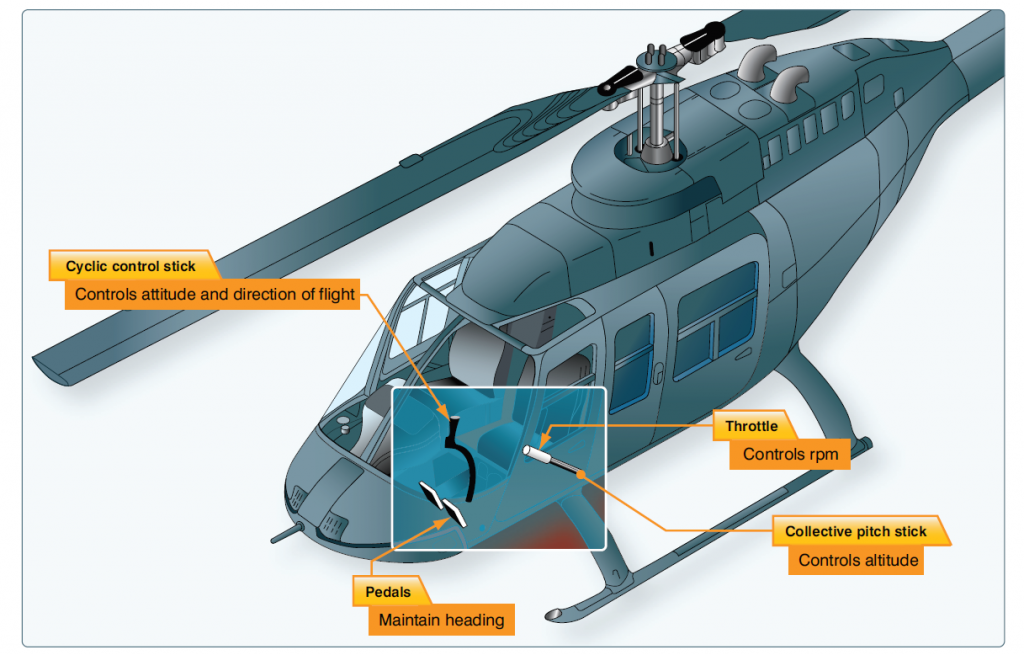
Os pedais na cabine de voo permitem ao piloto aumentar o diminuir o empuxo do rotor de cauda, conforme a necessidade, para neutralizar o efeito de torque.
Outros métodos de compensação de torque e controle direcional incluem o sistema de rotor de cauda Fenestron® e o modelo SUD Aviation que emprega uma hélice ducted enclosed by a shroud. Outro modelo, chamado NOTAR®, um modelo McDonnell Douglas sem rotor de cauda, emprega o ar direcionado através de uma série de fendas na cauda, com o equilíbrio obtido através de um duto de 90º localizado na parte de trás da cauda.

Forças do Giroscópio
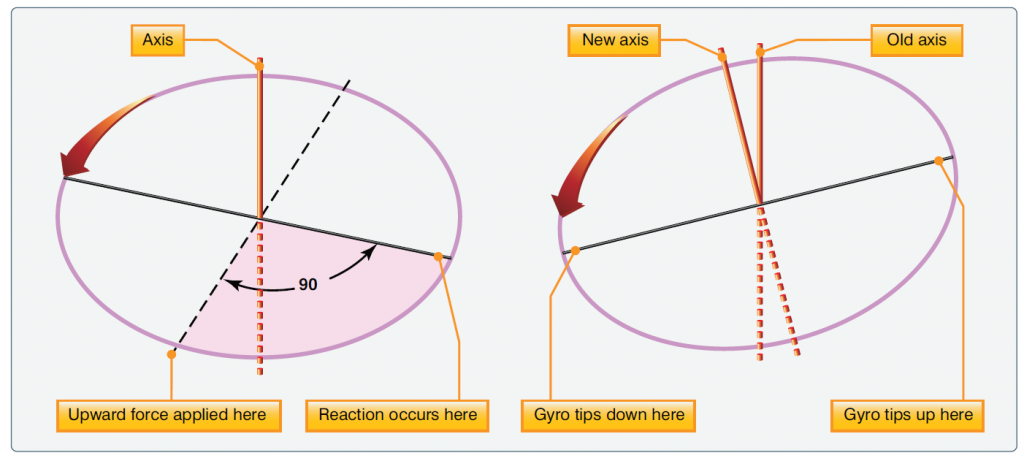
O rotor principal de um helicóptero atua como um giroscópio. Sendo assim ele possui propriedades da ação do giroscópio, dentre elas a precession.
A Precession do giroscópio é a ação resultante ou deflection de um objeto giratório quando uma força é aplicada sobre este objeto. Esta ação ocorre aproximadamente a 90º na direção da rotação do ponto onde a força é aplicada.
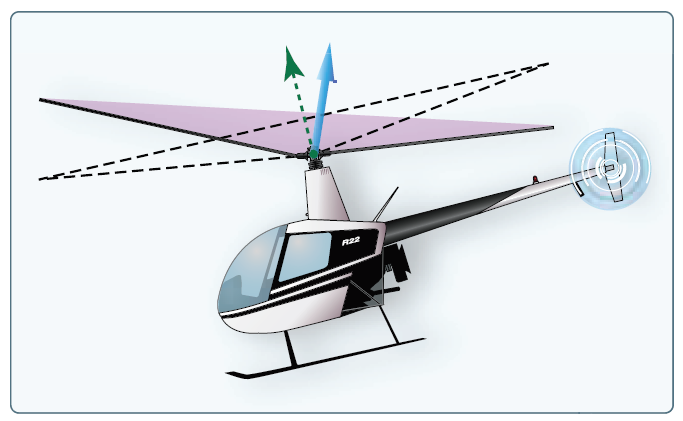
Com o uso deste princípio, o tip-path plane do rotor principal pode ser inclinado em relação ao do plano horizontal.
Observe um sistema rotor de duas pás para ver como o precession do giroscópio afeta o movimento do tip-path plane. Mover o controle de cyclic pitch aumenta o ângulo de ataque (AOA) de uma pá do rotor resultando em uma força de sustentação maior sendo aplicada neste ponto do plano de rotação.
A pá com o AOA aumentado tende a flap up, e a pá com o AOA diminuído tente a flap down. Devido ao fato do disco do rotor atuar como um gyro, as pás atingem sua deflection máxima em um ponto próximo a 90º later in the plane of rotation.
Conforme mostra a Figura, o AOA da pá retreating é aumentado e o AOA da pá advancing é diminuído, resultando em tipping forward of the tip-path plane, since maximum deflection takes place 90º later quando as pás estão na parte de trás e da frente, respectivamente.
Em um sistema rotor que utiliza três ou mais pás o movimento do controle de cyclic pitch altera o AOA de cada pá de maneira adequada para que no final o resultado seja o mesmo.
O movimento de controle do cyclic pitch em um sistema rotor de duas pás aumenta o AOA de uma pá do rotor resultando em uma força de sustentação maior aplicada neste ponto do plano de rotação.
Este mesmo movimento de controle simultaneamente diminui o AOA da outra pá proporcionalmente, diminuindo assim a força de sustentação aplicada neste ponto do
plano de rotação. A pá com o AOA aumentado tende a subir, e a pá com o AOA diminuído tende a descer. No entanto, o precession giroscópico evita que as pás subam ou desçam em maximum deflection até um ponto de aproximadamente 90º later in the plane of rotation.
Em um rotor de três pás o movimento de controle do cyclic pitch altera o AOA de cada pá na quantidade adequada para que o resultado seja o mesmo, a tipping forward of the tip-path plane quando o a alteração máxima no AOA é feito conforme cada pá passa pelos mesmos pontos sendo que o máximo aumento e diminuição são feitos em rotores de duas pás.
Conforme cada pá passa pela posição de 90º à esquerda, ocorre o aumento máximo do AOA. conforme cada pá passa pela posição de 90º à direita, ocorre a diminuição máxima do AOA. A maxima deflection ocorre 90° later, maximum upward deflection at the rear and maximum downward deflection at the front; the tip-path plane tips forward.
Condições de Voo do Helicóptero
Voo Pairado
Durante o voo pairado, um helicóptero mantém uma posição constante sobre um determinado ponto, normalmente há poucos metros do solo.
Para fazer um helicóptero pairar a sustentação e o empuxo gerados pelo sistema rotor atuam para cima e devem ser iguais ao pelo e o arrasto, que atuam para baixo.
Enquanto o helicóptero estiver pairando, a quantidade de empuxo do rotor principal pode ser alterado para manter a altitude desejada.
Isto é obtido através da alteração do ângulo de incidência (movendo o collective) das pás do rotor e também o AOA das pás do rotor principal. Ao alterar o AOA também altera o arrasto nas pás do rotor, e a potência liberada pelo motor precisa acompanhar essa alteração para manter o rotor a uma velocidade constante.
O peso a ser suportado é o peso total do helicóptero e de seus ocupantes. Se a quantidade de sustentação é maior do que o peso real, o helicóptero irá acelerar para cima até que a força de sustentação seja igual ao peso obtido pela altitude. Se o empuxo é menor do que o peso, o helicóptero acelera para baixo. Ao operar próximo ao solo, o efeito da proximidade com o solo muda esta resposta.
O arrasto de um helicóptero pairando é principalmente induzido pelo arrasto que ocorre enquanto as pás estão gerando sustentação. No entanto há um arrasto
de perfil nas pás enquanto que elas giram no ar. Ao longo desta exposição o termo “arrasto” inclui ambos o induzido e o de perfil.
Uma consequência importante da geração de empuxo é o torque. Conforme já abordado anteriormente, a Terceira Lei de Newton diz que para cada ação existe uma reação oposta igual. Portanto, enquanto o motor gira o sistema rotor principal em sentido anti-horário, a fuselagem do helicóptero tente a girar em sentido horário.
A quantidade de torque está diretamente relacionada a quantidade de potência do motor que está sendo usado para girar o sistema rotor principal. Lembre-se que o torque muda de acordo com a mudança da potência.
Para contra atacar esta tendência de torque induzido um rotor anti-torque ou rotor de cauda é incorporado na maioria dos projetos de helicópteros. O piloto pode variar a quantidade de empuxo gerado pelo rotor de cauda em relação a quantidade de torque gerado pelo motor. Conforme o motor gera mais potência no rotor principal, o rotor de cauda precisa gerar mais empuxo para superar o efeito de torque crescente. Isto é obtido através do uso de pedais anti-torque.
Traduzindo Tendência ou Direção
Durante o voo pairado, um helicóptero com um rotor principal tende a se dirigir ou movimentar na direção do empuxo do rotor de cauda. Esta tendência de direcionamento pode ser traduzida como tendência.
Para contra atacar esta direção, podem ser usadas uma ou mais das seguintes configurações. Todos os exemplos são baseados na rotação anti-horária do sistema rotor principal.
- A transmissão principal é montada em um ângulo levemente direcionado para a esquerda (quando visto de trás) para que o mastro do rotor tenha uma inclinação que se opõe ao empuxo do rotor de cauda.
- Os controles de voo podem ser rigged de maneira que o disco rotor seja inclinado levemente para a direita quando o ciclo está centralizado. Independente do método usado, o tip-path plane é levemente inclinado para a esquerda no voo pairado.
- Se a transmissão estiver montada de maneira com que o eixo rotor esteja na vertical em relação a fuselagem, o helicóptero “suspende” o skid esquerdo para baixo no voo pairado. O contrário também ocorre em sistemas rotores que giram em sentido horário quando vistos de cima.
No voo para frente, o rotor de cauda continua a empurrar para a direita e o helicóptero faz um pequeno ângulo com o vento quando os rotores estão nivelados e a slip ball está no meio. Isto é chamado de inherent sideslip.
Efeito de Solo
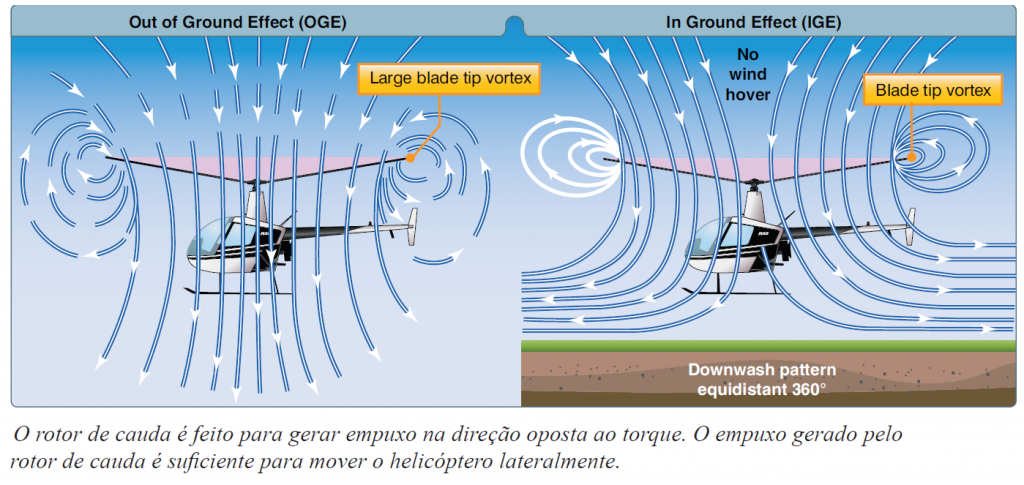
Ao pairar próximo ao solo ocorre um fenômeno conhecido como efeito de solo. Este efeito normalmente ocorre em alturas entre a superfície e um rotor de diâmetro acima. The friction of the ground causes the downwash from the rotor to move outwards from the helicopter.
Isto altera o movimento relativo do downwash de puramente vertical para uma combinação de movimento vertical e horizontal. Conforme o fluxo de ar induzido através do disco rotor é reduzido pela fricção de superfície, o vetor de sustentação aumenta. Esta condição permite com que o ângulo da pá do rotor seja menor para a mesma quantidade de sustentação, o que reduz o arrasto induzido.
O efeito de solo também restringe a geração de vórtices na ponta da pá, pois o fluxo de ar para cima e para baixo faz com que uma parte maior da pá gere sustentação.
Quando o helicóptero ganha altitude verticalmente sem velocidade para frente, o fluxo induzido não á mais restrito e os vórtices da ponta da pá aumentam com a diminuição do fluxo de ar para fora. Como resultado o arrasto aumenta, o que significa um ângulo de direção maior, e necessita mais potência para mover o ar para baixo através do rotor.
O efeito de solo está no seu máximo em condição sem vento sobre uma superfície firme e suave. Grama alta, terreno irregular e superfícies com água alteram o padrão do fluxo de ar, gerando um aumento nos vórtices do rotor.
Efeito Coriolis (Lei da Conservação de Momento Angular)
O efeito Coriolis também é referido como lei de conservação de momento angular. Ele diz que o valor do momento angular de um corpo em rotação não muda a menos que seja aplicada uma força.
Em outras palavras, um corpo em rotação continua a girar com a mesma velocidade a menos que uma força externa seja aplicada para alterar a velocidade de rotação.
O momento angular é o momento de inércia (massa vezes distância a partir do centro da rotação ao quadrado) multiplicado pela velocidade de rotação. A alteração na velocidade angular, conhecido como aceleração e desaceleração angular ocorre conforme do corpo em rotação se move para mais perto ou para mais longe do eixo de rotação.
A velocidade da massa em rotação aumenta ou diminui na proporção do quadrado do raio. Um bom exemplo deste princípio é um patinador de gelo girando. O patinador começa a rotação em um pé, com a outra perna e ambos os braços estendidos.
A rotação do corpo do patinador é relativamente baixa. Quando o patinador recolhe ambos os braços e a perna estendida o momento de inércia (massa vezes raio ao quadrado) fica muito menor e o corpo gira quase mais rápido do que o olho humano é capaz de acompanhar.
Para manter o momento angular constante (sem a aplicação de força externa), a velocidade angular precisa aumentar. A pá do rotor girando sobre o hub do rotor possui momento angular.
As the rotor begins to cone due to G-loading maneuvers, the diameter or the disk shrinks. Devido a conservação do momento angular, as pás continuam a se mover na mesma velocidade mesmo que as pontas das pás tenham uma distancia menor para percorrer devido ao diâmetro de disco reduzido. Esta ação resulta no aumento do rpm do rotor.
A maioria dos pilotos retém este aumento com um aumento no collective pitch. Conversely, as G-loading subsides and the rotor dist flattens out from the loss of G-load induced coning, as pontas das pás não tem distância para percorrer na mesma velocidade.
Esta ação resulta na redução do rpm do rotor. No entanto, se essa queda no rpm no rotor continua até o pondo em que ele diminui abaixo do rpm operacional, o sistema do controle do motor adicionam mais combustível/potência para manter o rpm específico do motor.
Voo Vertical
O voo pairado é um elemento do voo vertical. Aumentar o AOA das pás do rotor (pitch) enquanto a velocidade do rotor é mantida constante gera uma sustentação adicional e o helicóptero sobe.
Diminuir o pitch faz com que o helicóptero desça. Em uma condição sem vendo, quando a sustentação e o empuxo são menores do que o peso e o arrasto, o helicóptero desce verticalmente.
Se a sustentação e o empuxo são maiores do que o peso e o arrasto, o helicóptero sobe verticalmente.
Voo para Frente
Em um voo estável para frente sem alteração de velocidade do ar ou vertical, as quatro forças de sustentação, empuxo, arrasto e peso precisam estar em equilíbrio.
Uma vez que o tip-path plane for inclinado para frente, a força total de sustentação-empuxo também é inclinada para frente.
Esta força pode ser dividida em dois componentes – sustentação atuando verticalmente para cima e o empuxo atuando horizontalmente na direção do voo.
Além da sustentação e do empuxo, tem o peso (força que atua para baixo) e o arrasto (força oposta ao movimento do aerofólio através do ar).
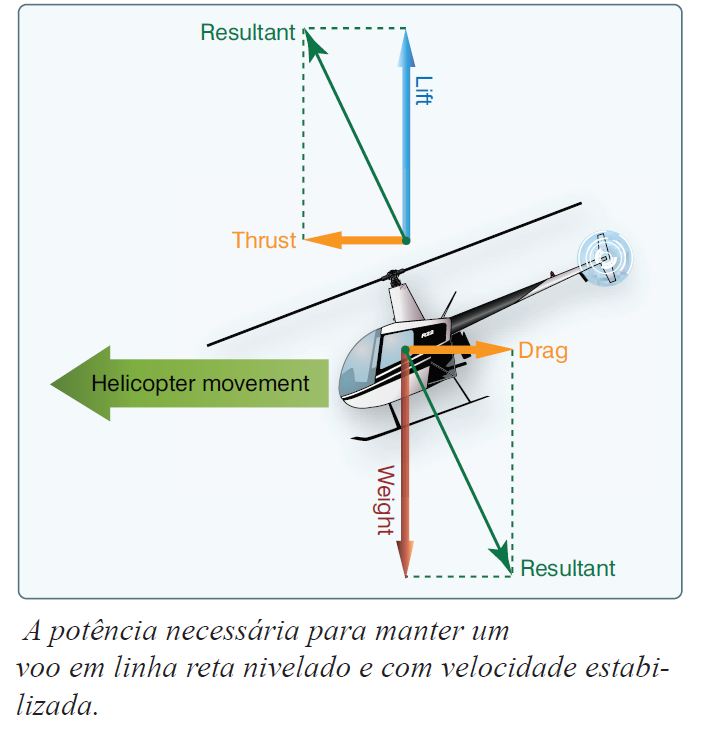
Em um voo em linha reta e nivelado para frente sem aceleração (direção e altitude constantes), a sustentação é igual ao peso e o empuxo é igual ao arrasto. Se a sustentação excede o peso o helicóptero acelera verticalmente até que as forças fiquem em equilíbrio.
Se o empuxo é menor do que o arrasto o helicóptero diminui até que as forças estejam em equilíbrio. Conforme o helicóptero anda para frente ele começa a perder altitude por causa da perda de sustentação conforme o empuxo é desviado para frente.
No entanto, conforme o helicóptero começa a acelerar, o sistema rotor fica mais eficiente devido ao aumento do fluxo de ar. Isto resulta em um excesso de potência do que o necessário para pairar.
A aceleração continuada gera um fluxo de ar ainda maior através do disco rotor e mais excesso de potência. Para manter o voo não acelerado, o piloto não precisa alterar a potência ou o movimento cíclico.
Qualquer alteração do gênero faz com que o helicóptero suba ou desça. Quando se atinge o voo em linha reta nivelado o piloto deve observar a potência (ajuste do torque) necessária e não fazer mais ajustes nos controles de voo.
Sustentação Translacional
A melhora na eficiência do rotor resultante do voo direcional é chamada sustentação translacional. A eficiência do sistema rotor pairado é altamente otimizado com cada nó de vento obtido pelo movimento horizontal da aeronave ou vento de superfície.
Conforme o vento gerado pelo movimento da aeronave ou vento de superfície entra no sistema rotor, a turbulência e os vórtices são deixados para trás e o fluxo de ar se torna mais horizontal.
Além disso o rotor de cauda fica com sua aerodinâmica mais eficiente durante a transição de voo pairado para voo para frente. O empuxo translacional ocorre quando o rotor de cauda se torna mais aerodinamicamente eficiente durante a transição de situação de voo pairado para voo para frente.
Conforme o rotor de cauda funciona progressivamente com menos turbulência do que o ar, essa melhora de condição gera mais empuxo anti-torque, fazendo com que o nariz da aeronave dê uma guinada para a esquerda (com o rotor principal girando em sentido anti-horário) e fazendo com que o piloto aplique o pedal da direita (diminuição do AOA nas pás do rotor de cauda) em resposta.
Além disso, durante este período a aeronave afeta os componentes horizontais do estabilizador encontrado na maioria dos helicópteros, o que tente a fazer com que o nariz do helicóptero fique mais nivelado.
As Figuras abaixo mostram padrões de voo em diferentes velocidades e como o fluxo de ar afeta a eficiência do rotor de cauda.
Sustentação Translacional Efetiva (ETL)
Conforme mencionado anteriormente, as pás do rotor se tornam mais eficientes a medida que a velocidade para frente aumenta. Entre 16-24 nós o sistema rotor excede completamente a circulação de velhos vórtices e começa a funcionar no ar relativamente parado.
O fluxo de ar através do sistema rotor é mais horizontal, portanto o fluxo e o arrasto induzidos são reduzidos. O AOA é consequentemente aumentado, o que faz com que o sistema rotor opere com mais eficiência.
Esta eficiência melhorada continua com a velocidade aumentada até que a melhor velocidade de ascensão seja alcançada, e o arrasto total atinja seu ponto mais baixo.
Conforme a velocidade aumenta, a sustentação translacional se torna mais efetiva, o nariz sobe ou se inclina para cima e a aeronave rola para a direita.
Os efeitos combinados da dissimetria da sustentação, gyroscopic precession e efeito do fluxo transverso geram essa tendência. É importante entender esses efeitos e antecipar sua correção.
Uma vez que o helicóptero é transicional através do ETL, o piloto precisa aplicar uma entrada cíclica para frente e para esquerda para manter a atitude constante do disco rotor.
Dissimetria da Sustentação
A dissimetria da sustentação é o diferencial de sustentação entre as metades de avanço e de retração do disco rotor gerados pela diferença da velocidade do fluxo de vento através de cada metade.
Esta diferença na sustentação faz com que o helicóptero fique incontrolável em qualquer situação diferente da de voo pairado em vento calmo. Devem haver meios de compensar, corrigir ou eliminar esta sustentação desigual para manter a simetria da sustentação.
Quando o helicóptero se move através do ar, o fluxo de ar através do disco do rotor principal é diferente on the advancing side than on the retreating side.
O vento relativo encontrado pela pá advancing é aumentada pela velocidade para frente do helicóptero, enquanto que a velocidade do vento relativo que atua na pá retreating é reduzida pela velocidade.
Desse modo, como resultado da velocidade do vento relativa a pá do disco avancando do rotor gera mais sustentação do que o lado recando da pá.

Se esta condição pudesse existir, um helicóptero com rotação de pá do rotor principal no sentido anti-horário rolaria para a esquerda devido a diferença na sustentação.
Na verdade, as pás do rotor principal flap and feather automaticamente para equalizar a sustentação através do disco rotor.
Os sistemas de rotor articulados, normalmente com três ou mais pás, incorporam uma ligação horizontal (flapping hinge) para permitir com que as pás individuais do rotor se movam ou flap up and down conforme elas giram.
Um sistema rotor semirrígido (duas pás) utiliza um teetering hing, que permite com que as pás flap juntas. Quando uma pá flap up, a outra flap down.
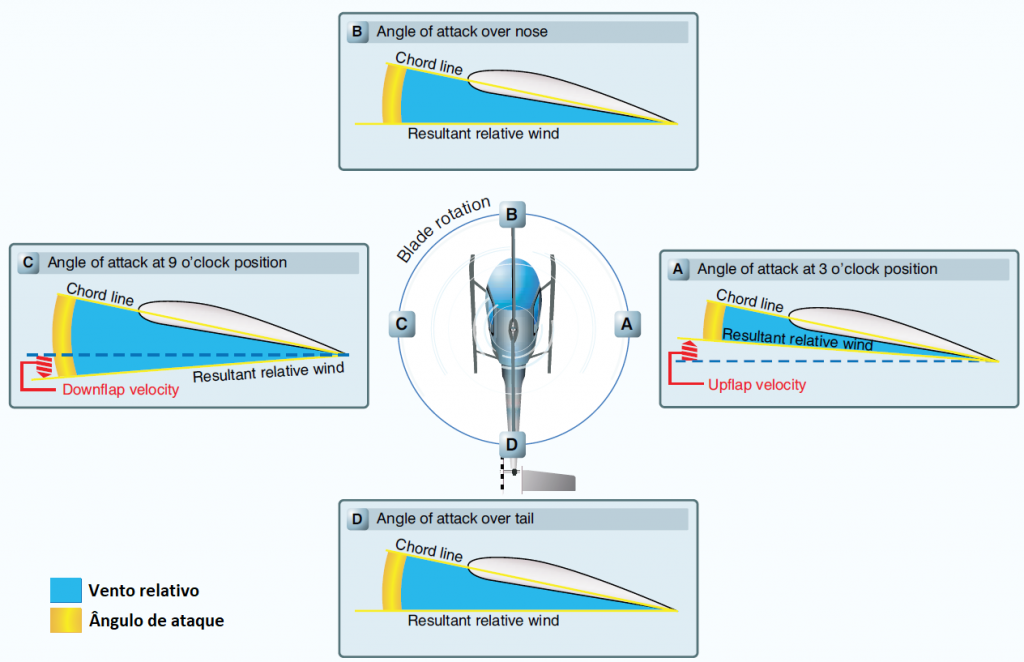
Conforme as pás do rotor atingem o advancing side do disco do rotor, elas atingem sua velocidade máxima em velocidade upward flapping.
Quando a pá flaps upward, o ângulo entre a linha da corda e o vento relativo resultante diminui. Isto reduz o AOA, que reduz a quantidade de sustentação gerada pela pá. Na posição C, a pá do rotor está na sua velocidade máxima downward flapping. Devido ao downward flapping, o
ângulo entre a linha da corda e o vento relativo resultante aumenta. Isto aumenta o AOA e consequentemente a sustentação gerada pela pá.
A combinação da blade flapping com o vento relativo lento atuando sobre a pá retreating normalmente limita a velocidade máxima para frente do helicóptero. Em uma velocidade para frente alta, a pá retreating es
tola devido ao alto AOA e baixa velocidade do vento relativo. Esta situação é chamada de “retreating blade stall” e é evidenciada pelo ângulo do nariz inclinado para cima, vibração, e tendência a rolagem, normalmente para a esquerda, em helicópteros com rotação de pá no sentido anti-horário.
Os pilotos podem evitar retreating blade stall não excedendo a velocidade máxima. Esta velocidade é determinada por VNE e é indicada em uma placa e marcada no indicador de velocidade por uma linha vermelha.
Durante o flapping aerodinâmico das pás do rotor conforme elas compensam a dissimetria da sustentação, a advancing blade atinge seu deslocamento máximo upward flapping sobre o nariz e deslocamento flapping downward sobre a cauda. Isto faz com que o tip-path plane incline para trás e seja chamado de blowback.
Para compensar o blowback, move the cyclic para frente. O blowblock é mais acentuado em velocidades mais altas.
A figura acima mostra como o disco rotor é originalmente orientado with the front down following the initial cyclic input.
O piloto usa cyclic feathering para compensar a dissimetria da sustentação, permitindo com que ele controle a atitude do disco rotor.
O cyclic feathering compensa a dissimetria da sustentação (alteração do AOA) da seguinte maneira.
Em um voo pairado uma sustentação uniforme é gerada em volta do sistema rotor com inclinação e AOA igual em todas as pás em todos os pontos do sistema rotor (desconsiderando a compensação pela tendência de tradução). O disco rotor é paralelo ao horizonte.
Para desenvolver esta força de empuxo, o sistema rotor precisa ser inclinado na direção desejada para o movimento. O cyclic feathering altera o ângulo de incidência de maneira diferente ao redor do sistema rotor.
O movimento cíclico para frente diminui o ângulo de incidência em uma parte do sistema rotor enquanto aumenta o ângulo em outra parte.
O bater de pás máximo para baixo sobre a cauda inclina tanto o disco rotor quanto o vetor de empuxo para frente. Para evitar a ocorrência de blowback o piloto precisa continuamente mover o cíclico para frente conforme a velocidade do helicóptero aumenta.
A Figura acima ilustra as alterações de ângulos de inclinação conforme o cíclico é movido para frente a uma velocidade crescente. Em um voo pairado, o cíclico é centralizado e a inclinação do ângulo nas pás que recuam e que avançam é a mesma.
Em velocidades baixas para frente moving the cyclic para frente reduz o ângulo pitch na pá de avanço e aumenta o ângulo pitch na pá de recuo. Isto gera uma leve inclinação no rotor.
Em velocidades maiores para frente o piloto deve continuar a mover o cyclic para frente. Isto reduz o pitch angle na pá de avanço e aumenta o pitch angle na pá de recuo. Isto resulta em mais inclinação no rotor em velocidades mais baixas.
O componente de sustentação horizontal (empuxo) gera velocidade maior no helicóptero. A velocidade do ar maior induz a batida das pás a manter a simetria da sustentação.
A combinação de batida de pás com cyclic feathering mantém a simetria da sustentação e atitude desejada no sistema rotor e no helicóptero.
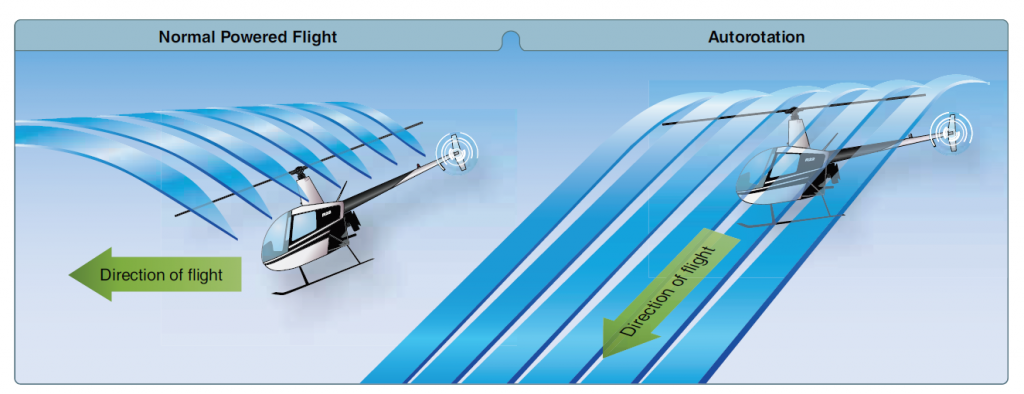
Auto Rotação
A auto rotação é o estado de voo no qual o sistema rotor principal de um helicóptero é girado pela ação do ar se movendo através do rotor ao invés de ser movido pelo rotor.
Em um voo normal o ar é puxado para dentro do sistema rotor principal pela parte de cima e expelido pela parte de baixo, mas durante a auto rotação o ar se move para cima do sistema rotor de baixo para cima conforme o helicóptero desce.
A auto rotação é permitida mecanicamente através de uma unidade freewheeling, que é um special clutch mechanism que permite com que o rotor principal continue a girar mesmo que o motor não esteja em funcionamento.
Se o motor falha, a unidade freewheeling automaticamente disengages o motor do rotor principal permitindo que o rotor principal a girar livremente.
Este é o meio pelo qual um helicóptero pode aterrissar com segurança em um evento de falha do motor. Consequentemente todos os helicópteros precisam demonstrar esta capacidade para ser certificado.
Fotos de helicópteros e sistemas aqui!
Referência
FAA Chapter 02 Aerodynamics, Aircraft Assembly, and Rigging
BAIXAR
[wpfd_single_file id=”2696″ catid=”83″ name=”Chapter 02 Aerodynamics, Aircraft Assembly, and Rigging”]
Simulado BANCA ANAC HELICÓPTERO
[ninja-inline id=715]

Artigos Relacionados
0 Comentários